AURELION可提供优质的可视化、计算真实的传感器数据,从而测试和验证感知及驾驶功能。
灵活运用
在HIL、SIL和云场景中测试和验证ADAS/AD感知及驾驶功能。
轻松获取地面实况数据
提供像素完美的地面实况数据,用于自动测试和验证感知算法。
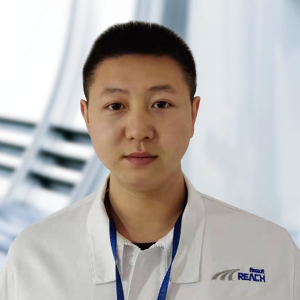
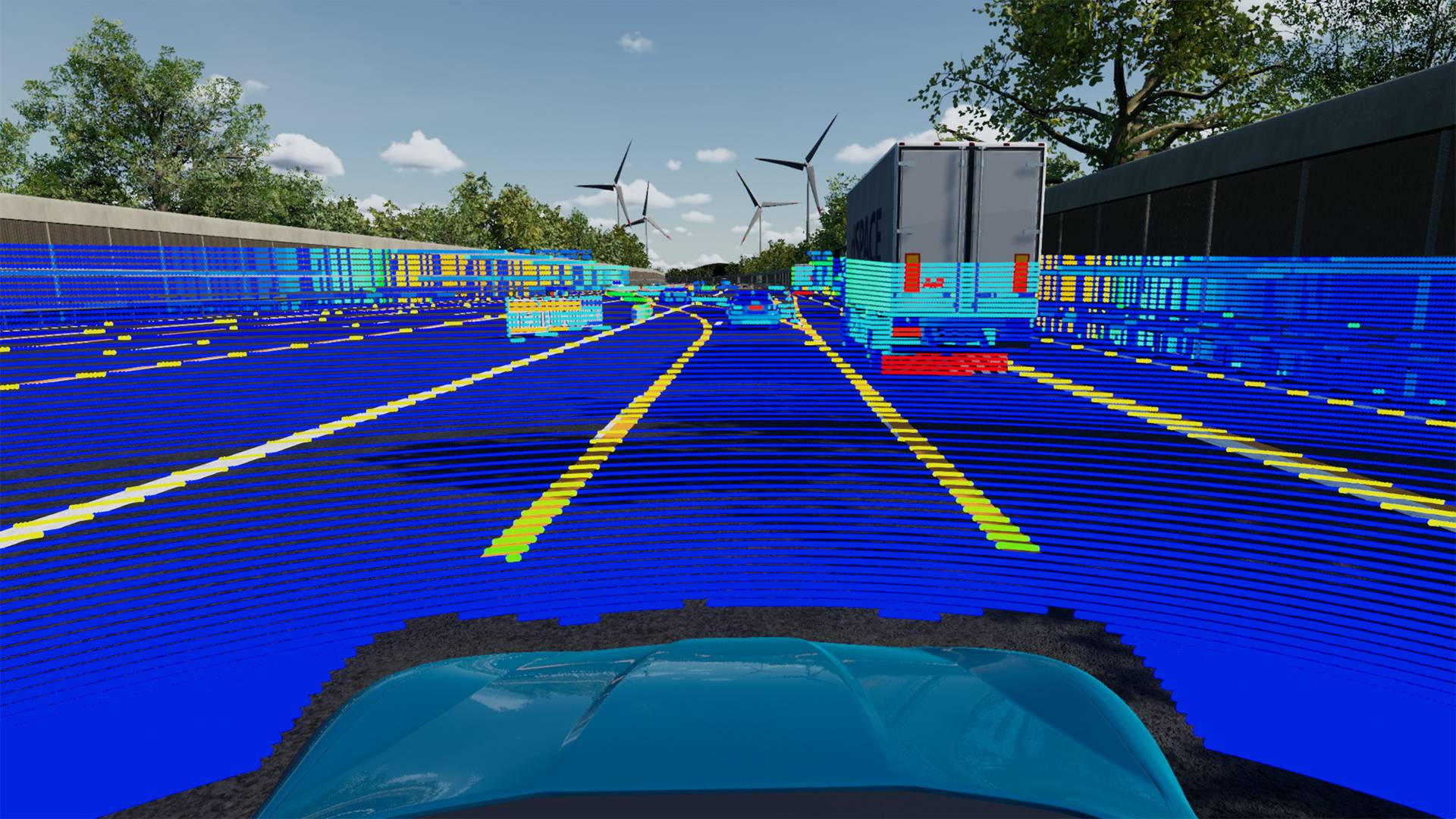
传感器仿真
高度逼真、可靠地仿真摄像头、雷达和激光雷达传感器。
环境逼真
基于OpenDrive和ModelDesk,自动生成3D道路和环境。
AURELION是什么?
AURELION是灵活的软件解决方案,适用于传感器仿真和可视化。有了它,您可以将真实的传感器数据集成到感知和驾驶功能的开发、测试及验证流程中。在软件在环(HIL)、硬件在环(SIL)和车辆在环(VIL)等开发过程的各个阶段,可以使用相同的模型。
- dSPACE仿真工具高度集成化,使得AURELION可以快速、轻松地集成到解决方案中。
- 我们的传感器仿真模型可以确保最高品质,同时满足您的实时需求
- 开放式接口集成定制传感器模型,仿真更加逼真
- 在第三方仿真中灵活集成AURELION,将我们的传感器仿真融入您的环境中
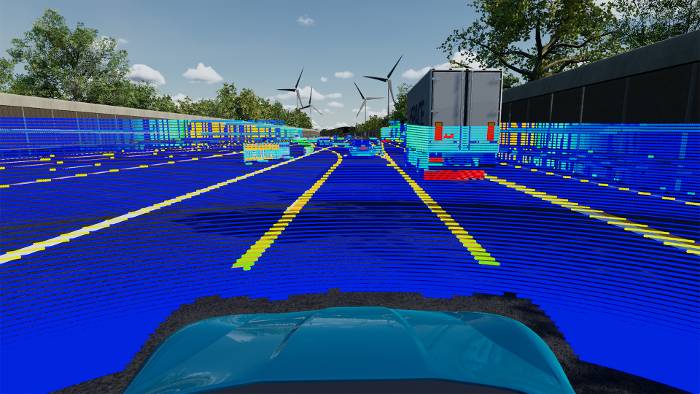
AURELION的应用领域
AURELION适合各种用例和配置。它可以在开发的各个阶段使用,例如,硬件在环(HIL)测试、软件在环(SIL)测试、车辆在环(VIL)测试,以及云中的并行验证。
应用领域示例:
- 汽车、自动驾驶汽车、ADAS
- 农业
- 非公路
-
自动化移动机器人










传感器模型

摄像头传感器模型
逼真地仿真直线透镜或鱼眼镜头的摄像头及相应的传感器环境。
- 高保真图形、照明效果以及可配置的真实镜头轮廓
- 图像修改和故障注入选项
- 用于输出原始传感器数据的可配置颜色过滤器
- 使用语义分割、光流和2D边界框等地面实况信息,来测试和验证您的算法


地面实况
为了开发和测试计算机视觉,需要在传感器数据中添加地面实况信息。一方面,它们可以用来自动测试感知算法,还可以用于训练神经网络。与真实数据中的地面实况数据相比,AURELION生成的地面实况数据像素完美,而且免费。适用于每个类别,例如行人、车辆和交通标志。
- 摄像头、雷达和激光雷达有专门的地面实况数据输出
- 为适应传感器,输出会自动参数化
- 借助C API,人们可以轻松获得与原始传感器数据同步的地面实况

2D边界框
2D边界框是指包围摄像头传感器识别对象的二维边框。它们可以用来自动测试感知算法可否正确识别场景中的对象。这些信息以二进制数据形式提供,您可以将这些信息用于计算机管道构建中的自动测试。
-
将摄像头传感器参数化,呈现像素效果出色的
边界框 - 还包括有关各对象类别和实例的信息
- 筛选您需要的对象类型
- 可以配置为集成或删除被遮挡的区域


3D环境


AURELION Manager

选用产品





用户的心声!
传感器仿真解决方案 AURELION 可以将逼真的传感器数据整合到各种感知和驾驶功能的开发、测试和验证过程中。

使用dSPACE仿真解决方案,我们可以通过灵活配置的方式来高效、可靠地检查我们待测系统实车的传感器和驾驶员辅助系统是否正常运作。

得益于AURELION中的传感器真实仿真,我们在盲点检测信息系统的开发过程中,考虑到了各种情况,例如BSIS开发过程中常见的外部影响,比如建筑工地或周边建筑造成的多路径反射,以及城市交通各种变化带来的影响。

dSPACE解决方案在仿真和验证方面的性能让我们心悦诚服,该解决方案助力我们将宏伟的自动街道清扫机项目高效地付诸实践。

dSPACE的真实传感器仿真模型能够生成复杂三维场景中的原始传感器数据。

采用高保真度摄像头模型,我们可以通过虚拟方式可靠地仿真高度复杂的测试任务。