AURELION offre une visualisation de haute qualité et calcule des données de capteur réalistes pour tester et valider vos fonctions de perception et de conduite.
Utilisation flexible
Testez et validez vos fonctions de perception et de conduite ADAS/AD sur les scénarios HIL, SIL et cloud.
Données de réalité terrain gratuites
Fournit des données de réalité terrain à la définition parfaite pour les tests et la validation automatiques de vos algorithmes de perception.
Simulation des capteurs
Simulation hautement réaliste et déterministe des capteurs caméra, radar et lidar.
Environnement réaliste
Génération automatique de routes et d’environnements 3D sur la base d’OpenDrive et de ModelDesk.
Qu’est-ce qu’AURELION ?
AURELION est une solution logicielle flexible pour la simulation et la visualisation des capteurs. Elle vous permet d’intégrer des données de capteurs réalistes dans vos processus de développement, de test et de validation des fonctions de perception et de conduite. Les mêmes modèles peuvent être utilisés tout au long des différentes phases de développement, par exemple dans le Hardware-In-the-Loop (HIL), le Software-In-the-Loop (SIL) et le Vehicle-In-the-Loop (VIL).
- Les outils de simulation très intégrés dans dSPACE rendent l’intégration d’AURELION rapide et facile
- Nos modèles de simulation de capteur vous garantissent une qualité optimale tout en répondant à vos exigences en temps réel.
- L’interface ouverte pour intégrer des modèles de capteurs personnalisés permet de mettre la simulation au plus près de la réalité
- L'intégration flexible d'AURELION dans la simulation tierce partie apporte notre simulation de capteur dans votre environnement
Domaines d'application pour AURELION
AURELION convient à un large éventail de cas d'utilisation et de configurations. Il peut être utilisé tout au long des différentes phases de développement, par exemple lors des tests HIL (Hardware-In-the-Loop), des tests SIL (Software-In-the-Loop), des tests VIL (Vehicle-In-the-Loop) et pour la validation parallèle dans le cloud.
Exemples de domaines d’application :
- Automobile, véhicules autonomes, ADAS
- Agriculture
- Hors route
-
Robots mobiles automatisés










Les avantages majeurs de la simulation des capteurs
Le moteur de rendu 3D, les modèles de simulation dSPACE haute précision, les modèles 3D réalistes et les informations matérielles haute résolution permettent de simuler avec précision les capteurs et les environnements automobiles dans différentes conditions météorologiques et d'éclairage.
Modèles de capteur

Modèle de capteurs caméra
Simuler de manière réaliste une caméra avec un objectif rectiligne ou œil de poisson et l'environnement de capteurs correspondant.
- Graphismes haute fidélité, effets d'éclairage et profils d'objectifs réalistes configurables
- Options de modification d’image et d’injection de pannes
- Filtre coloré configurable pour la sortie des données de capteurs brutes
- Utilisez les informations de réalité terrain telles que la segmentation sémantique, le flux optique et les boîtes de délimitation 2D pour tester et valider vos algorithmes

Modèle de capteurs radar
Simuler les données radar synthétiques très réalistes pour toutes les couches d’injection en temps réel.
- Réponse impulsionnelle de voie, données brutes, listes de détection et sortie des listes d'objets disponibles
- Des matériaux optimisés pour les radars et un lancer de rayon à plusieurs voies assurent des effets comme dans les mesures réelles (par exemple, cibles fantômes)
- Le lancer adaptatif de rayon garantit des résultats précis et des performances optimales, même dans les configurations multi-antennes

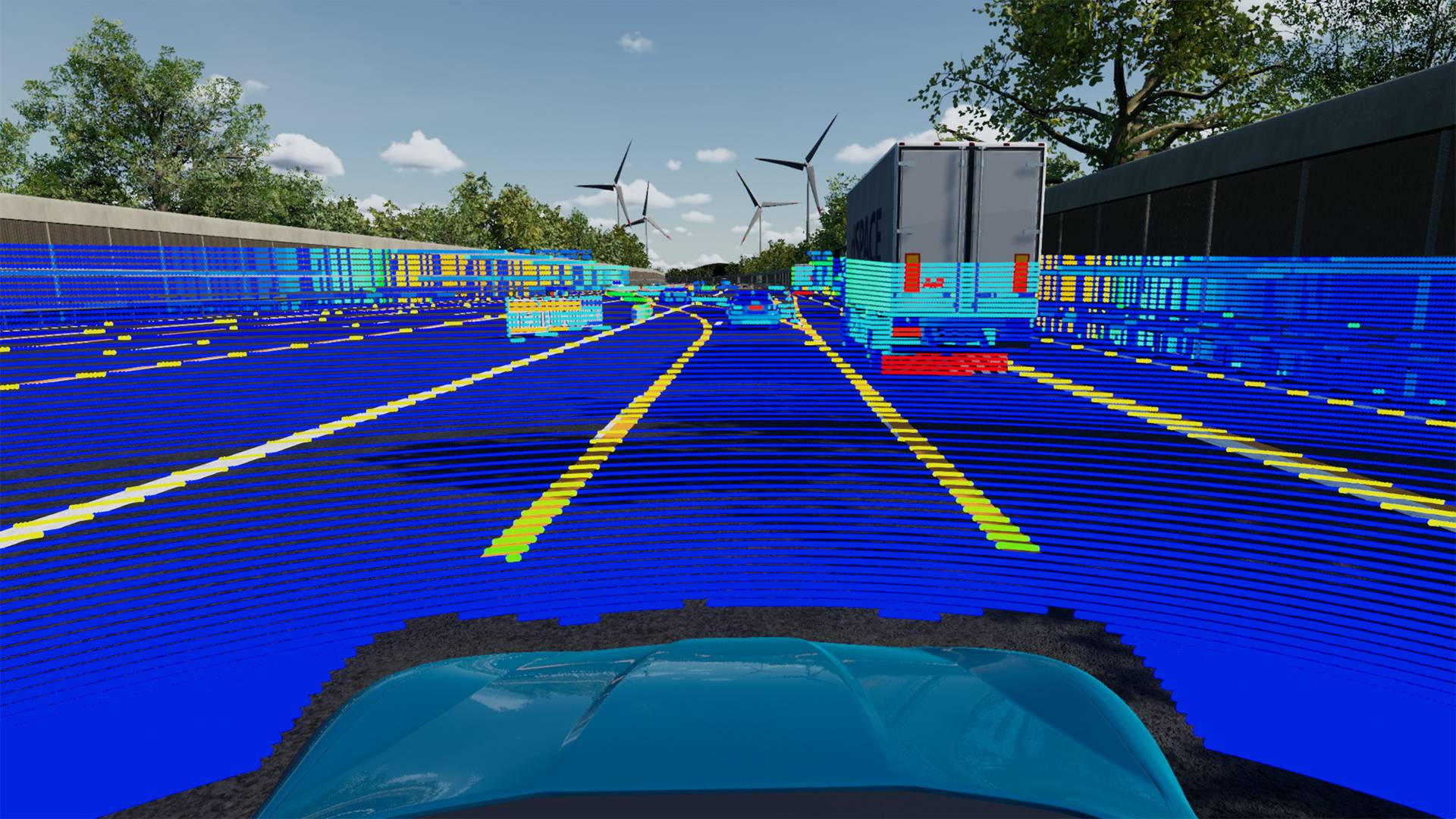
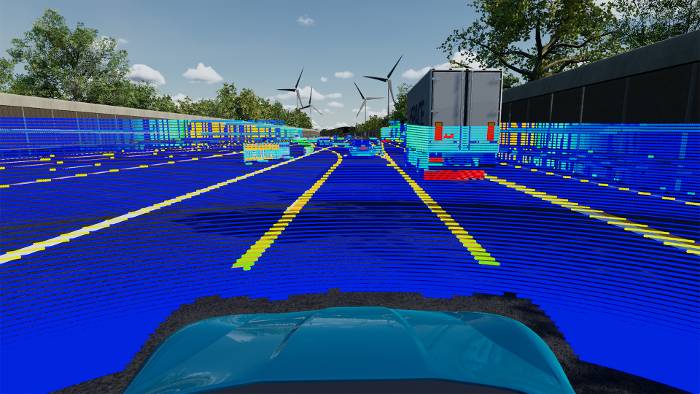
Modèle de capteurs lidar
Simuler de manière réaliste un capteur lidar et l’environnement de capteurs correspondant.
- Génération d'un nuage de points avec calcul réaliste des valeurs de réflectivité basées sur des équipements spécifiques au lidar
- Support des capteurs à balayage et flash
- Effets de distorsion de mouvement réalistes avec décalages temporels configurables pour chaque rayon
Réalité terrain
Pour développer et tester la vision de l'ordinateur, il est nécessaire d'ajouter des informations de réalité terrain aux données du capteur. D'une part, elles sont utilisées pour des tests automatiques d'algorithmes de perception et d'autre part, elles peuvent également être utilisées pour entraîner des réseaux neuronaux. AURELION compare les données de réalité terrain à partir de données réelles et génère les différentes variantes de réalité terrain avec une définition parfaite et ce gratuitement. Pour chaque catégorie, comme les piétons, les voitures et les panneaux de signalisation.
- Résultats de réalité terrain spéciaux disponibles pour caméra, radar et lidar
- Les résultats sont automatiquement paramétrés pour s’adapter à vos capteurs
- La synchronisation à la réalité terrain des données de capteurs brutes peut facilement être obtenue via une API C

Boîtes de délimitation 2D
Les boîtes de délimitation 2D sont des boîtes bidimensionnelles qui renferment des objets dans le capteur caméra. Elles peuvent être utilisées pour tester automatiquement si votre algorithme de perception identifie correctement les objets disponibles dans votre scène. L'information est donnée sous forme de données binaires afin que vous puissiez utiliser l'information pour les tests automatiques dans votre pipeline de création.
-
Paramétré pour votre capteur caméra afin d’obtenir des
boîtes de délimitation 2D à la définition parfaite - Comprend également des informations sur la classe et l'instance de chaque objet
- Filtré pour le type d'objets dont vous avez besoin
- Peut être configuré pour intégrer ou éliminer les zones masquées

Segmentation sémantique
La segmentation sémantique des images incluses dans AURELION fournit des annotations du niveau pixel aux régions d'images. Pour les tests et l'apprentissage de l'intelligence artificielle, en particulier pour la conduite autonome, ces informations peuvent être utilisées pour aider les réseaux neuronaux à apprendre quels motifs ou textures appartiennent à quelle classe sémantique d'objets.
Par la suite, ces réseaux peuvent être mis en œuvre pour des cas d'utilisation aussi variés que la génération d'images, l'adaptation du domaine, la détection de voie ou la détection de zone de conduite.
- Catégories personnalisables
- Mêmes catégories entre la caméra, le radar et le lidar
- ID de catégorie de sortie et ID d'instance

Réalité terrain pour les capteurs actifs
La réalité terrain est également disponible pour nos capteurs actifs comme les capteurs radar et lidar. Cela comprend par exemple des informations sur la catégorie et l'instance pour chaque détection d'un capteur radar et chaque point dans un nuage de points. Ces informations peuvent être facilement obtenues et utilisées pour entraîner les réseaux neuronaux.
- Les ID de catégorie et les ID d'instance sont identiques sur chaque capteur pour identifier facilement les capteurs dans les données de capteur
- Différents modes de résultat nécessitent différents types d'informations de réalité terrain (obtenez-les facilement via une API C)
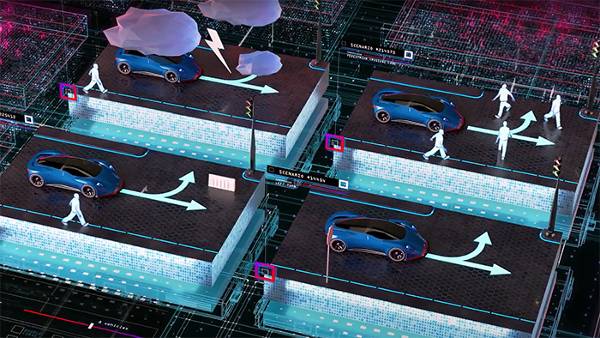
Environnement 3D

Avec notre logiciel, nous proposons un support pour des normes telles que OpenScenario et OpenDrive, ce qui nous permet de générer automatiquement un environnement 3D pour vous. Cela vous permet d’économiser du temps et de l’énergie et, ainsi, de vous concentrer sur ce qui compte le plus : votre simulation.
- Nous proposons des outils qui vous permettent de modifier la route et aussi d’ajouter des modèles3D à l'environnement
- Les routes et le terrain sont automatiquement générés sur la base des fichiers OpenDrive
- Notre bibliothèque de modèles 3D comprend des équipements spécifiques pour la simulation réaliste des capteurs
- Pour un démarrage rapide, nous fournissons plusieurs environnements haute fidélité dans les zones urbaines et autoroutières

Diverses options de personnalisation
Nous savons que chaque simulation est unique, et vous devez parfois modifier la route ou l'environnement 3D pour répondre à vos besoins spécifiques. C'est la raison pour laquelle notre logiciel vous fournit également les outils pour effectuer ces modifications, vous offrant la flexibilité et le contrôle nécessaires pour créer un environnement personnalisé qui répond exactement à vos besoins.
AURELION Manager

Avec AURELION Manager, vous pouvez paramétrer vos capteurs virtuels et les placer sur une représentation 3D de votre voiture ego, vous donnant un contrôle complet sur la configuration de vos capteurs. Notre solution logicielle vous permet d'optimiser vos instances AURELION et de rationaliser votre workflow.
- Importez la représentation 3D de votre voiture dans AURELION
- Visualisez vos instances de capteurs sur un modèle 3D de votre voiture ego
- Prenez des décisions précises sur le placement de vos capteurs
- Répartissez la charge en précisant quel capteur doit être calculé sur quel PC
- Intégration d’AURELION à votre environnement de test en toute transparence avec Automation API
Produits optionnels





Ce que nos clients disent de nous
The sensor-realistic simulation solution AURELION makes it possible to integrate realistic sensor data into the processes for developing, testing, and validating a wide range of perception and driving functions.

Avec la solution de simulation dSPACE, nous disposons d’un moyen flexible et configurable de vérifier efficacement et de manière fiable le bon fonctionnement des capteurs et des systèmes d’assistance au conducteur des véhicules réels dans nos centres d’essais.

Grâce à la simulation réaliste par capteur dans AURELION, nous avons pu prendre en compte, par exemple, les influences externes habituelles telles que les réflexions multivoies dues à des situations de chantier ou de bâtiments périphériques ainsi que les influences dans le trafic urbain dans une grande variété de variations lors du développement de nos systèmes de surveillance des angles morts.

La compétence de la solution de dSPACE en matière de simulation et de validation nous a totalement convaincus et nous a aidés à mettre efficacement en pratique notre ambitieux projet de balayeuse autonome de voirie.

Les modèles de simulation réaliste de capteurs de dSPACE permettent de générer des données de capteur brutes à partir de scénarios 3D complexes.

Grâce au modèle de caméra réaliste, nous pouvons simuler virtuellement des tâches de test très complexes en toute fiabilité.




Certifié ISO 26262
AURELION a été certifié par le TÜV SÜD conformément à la norme ISO 26262 pour les systèmes de sécurité dans les véhicules à moteur. L’outil est ainsi adapté aux projets de développement liés à la sécurité conformément à la norme ISO 26262:2018 pour tout niveau d’intégrité de sécurité automobile (ASIL) .
En d'autres termes : Les constructeurs et fournisseurs de véhicules peuvent exclure AURELION de la qualification ISO 26262 de l'ensemble de leurs processus et se concentrer sur la preuve de la sécurité fonctionnelle de leurs propres chaînes de processus.

Support pour les utilisateurs d'AURELION
Liens vers des informations techniques détaillées et le service client. L'accès peut nécessiter une inscription.
