未来,智能网联自动驾驶车辆可通过软件实现高度的自定义。软件和服务能力正日益成为汽车行业竞争中的决定性因素。东软睿驰已经为下一代车辆创建了符合 AUTOSAR 标准的软件平台。该软件包含全面的高级驾驶辅助/自动驾驶 (ADAS/AD) 堆栈,以及支持自动驾驶 (L2+/L4) 的驾驶监测系统 (DMS) 和高精度定位控制器。东软睿驰致力于开发世界上最智能的环境检测和识别技术以提高交通运输的安全性和效率。
智能辅助系统
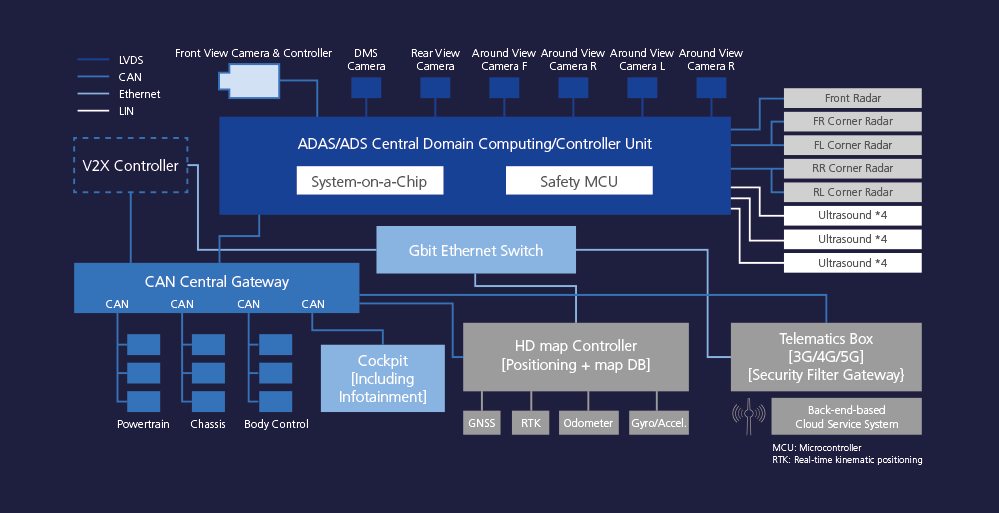
ADAS/AD 堆栈基于多传感器技术,并通过机器学习训练算法。该堆栈符合中国商用车法规和 C-NCAP 的要求。此外,它还考虑了Euro-NCAP 2025 路线图的要求。目前支持的功能如下图所示。
- 交通堵塞辅助(TJA),
- 自适应巡航控制(ACC),
- 自动紧急制动(AEB),
- 前方碰撞警告系统(FCW),
- 车道偏离预警系统(LDW),
- 车道保持辅助(LKA),
- 高级泊车辅助系统(APA),
- 全景式监控影像系统(AVM)
目标:稳健和创新
东软睿驰的目标是不断扩展和优化 ADAS/AD 功能。此外,开发团队还为基于摄像头的功能定义了性能指标,而以前使用的开发和验证解决方案无法可靠、高效地达到要求的性能指标。为了实现强大的功能,我们还必须对传感器感知融合以及整个系统的新算法进行早期验证。

挑战:测试数据的可用性
开发过程中面临的一个特殊挑战是必须确保有随时可用的正确测试数据。一方面是使用尽可能准确的传感器数据。另一方面是可以灵活使用各种极端情况的数据,即特别极端的交通状况。通过在驾驶测试过程中记录数据,我们可以获得准确的传感器数据。然而,真实的驾驶测试不足以覆盖尽可能多的极端情况,因为一些交通险情在现实中很难实现。此外,更换传感器后需要进行新的驾驶测试,成本十分高昂。因此,我们使用基于仿真的方法,它可以高度灵活地仿真任意场景,包括所有极端情况。但是,人工生成的数据必须基于相应传感器的物理特性。因此,高度逼真的传感器模型是仿真成功的决定性要素。

选择验证解决方案
对东软睿驰来说,首要任务是评估开发和测试解决方案是否合适。除了现实的传感器模型外,我们还希望通过软件在环 (SIL) 仿真在早期开发阶段为开发人员提供支持。此外,我们还需要在硬件在环 (HIL) 仿真中无缝复用SIL积累的工作成果。到目前为止,在传感器原始数据传输方面,还没有独立于供应商的接口标准。因此,用于生成原始传感器数据的测试系统必须支持各种传感器接口和协议。只有这样,东软睿驰的控制单元才能符合广大客户的需求。最后,这种开发和测试解决方案必须易于使用且性能强大,这很重要。在对多个验证系统进行评估之后,我们决定使用 dSPACE基于软件和硬件的解决方案。该解决方案具有三大优势。第一,传感器仿真非常逼真。第二,数据注入方面系统灵活性很强。第三, SIL 和 HIL 仿真之间能够保持测试工具的一致性。

早期 SIL 仿真支持功能开发
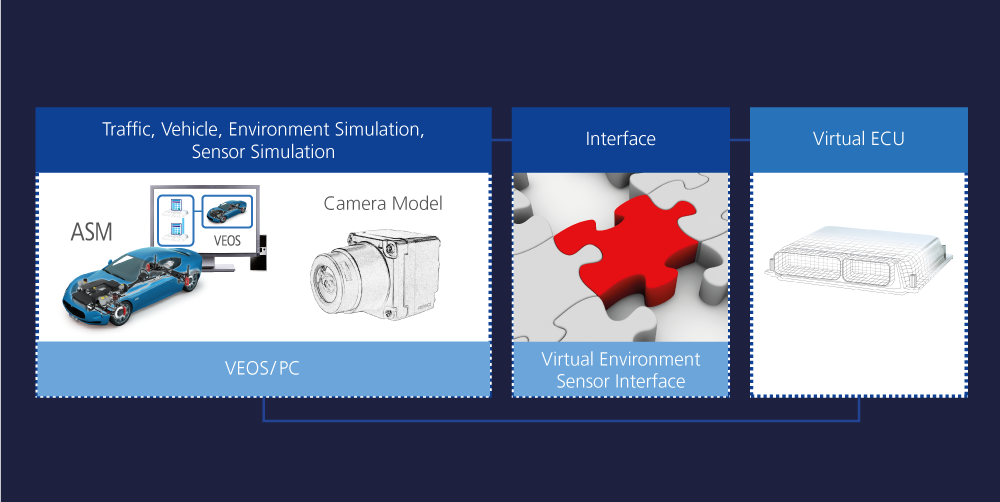
通过使用 dSPACE 工具链,我们可以在开发中使用适用于感知融合算法以及 ADAS/AD 功能的纯基于软件的验证解决方案。它基于Automotive Simulation Models (ASM) 工具套件的真值传感器模型以及 dSPACE Sensor Simulation的摄像头物理传感器模型。仿真平台是 dSPACE的VEOS平台。ASM 仿真所有动态的交通参与者和静态的道路环境。利用 dSPACE Sensor Simulation,我们能生成一个完整的摄像头模型输出的 3D 虚拟画面。随后,摄像头图像通过存储器接口输入到待测算法中。该算法对图像信息进行分析,并提供相关信息,用于虚拟主车的控制(例如 ASM 仿真的制动系统)。当然,也可以在仿真中使用一个完整的虚拟控制单元,其中包含已开发的算法等。虚拟 ECU 可与仿真模型并行集成到 VEOS 中,VEOS 支持如下格式:Simulink® 模型、FMU 或基于 AUTOSAR 的虚拟 ECU。为此,东软睿驰使用了 dSPACE 推荐的 V-ECU 方法。
创建逼真的仿真场景
仿真场景(即仿真中所有物体的位置和轨迹)会基于实车路采数据生成,生成的仿真场景还可以轻松实现泛化。例如,可以单独更改各个道路使用者的速度,重新定义距离,更改物体的大小等等。因此开发人员能够在早期阶段确定算法的性能,包括各种极端工况。开发人员还可以使用手动搭建的场景,例如 C-NCAP。

在 HIL 仿真中验证控制单元
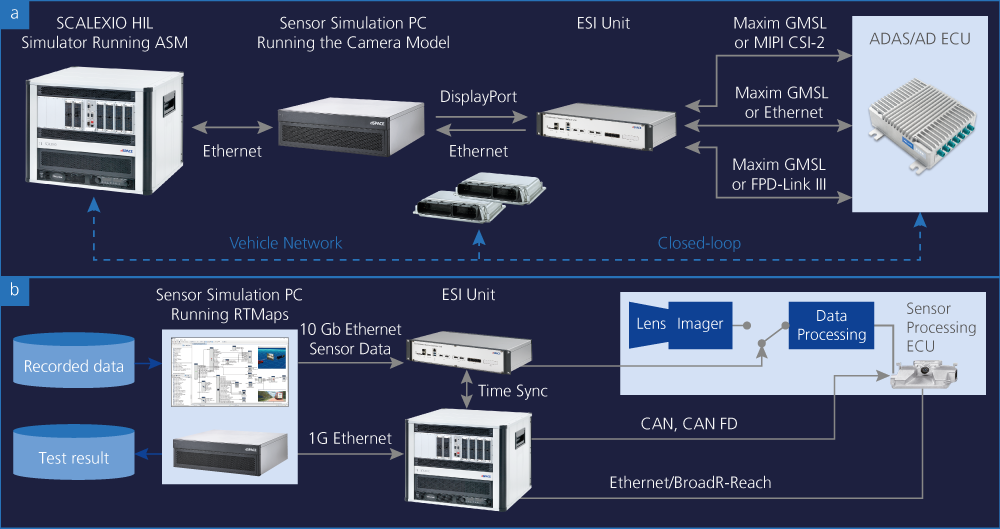
每当在 ECU 上运行新版本的 ADAS/AD 软件时,都会使用 HIL 仿真执行 ECU 测试。为了让控制单元正常工作,必须和 SIL 一样完整仿真其外围环境,包括配置感知传感器的车辆及交通环境。为了将 ECU 硬件和摄像头的所有信号处理过程完全集成到测试范畴中,必须将仿真的传感器数据直接注入到成像器芯片后面的信号链中。为此,计算出的图像数据必须转换成相应的电信号。在这里,我们使用了Environment Sensor Interface Unit(ESI Unit)。它是强大仿真平台的一部分:在 SCALEXIO 系统上使用 ASM 进行交通仿真时,dSPACE 的Sensor Simulation PC 上会运行摄像头传感器模型。它配备有一个显卡,可以根据地面实况数据实时计算三维世界和传感器的特性,例如摄像头的光学畸变。ESI Unit随后将显卡的输出转换成控制单元所需的信号,并处理部分闭环仿真,如曝光控制。由于涉及不同的传感器类型,ESI Unit能够支持各种信号接口。
数据回放测试
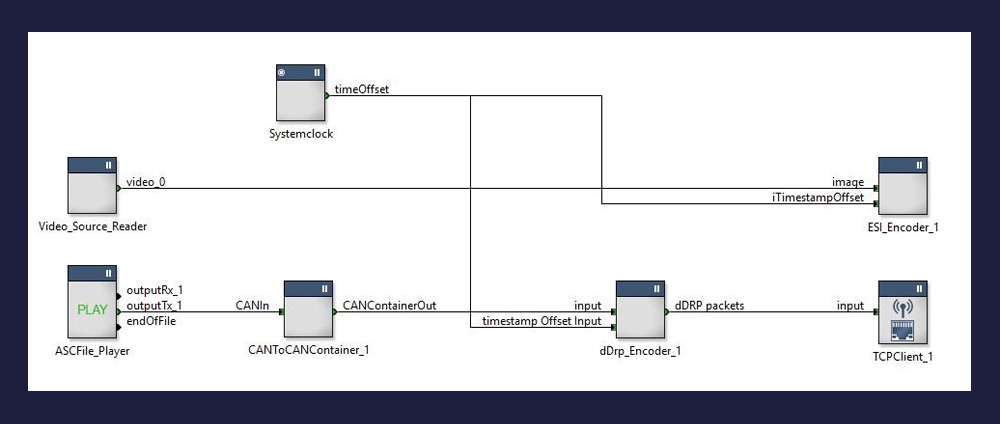
除了 SIL 和 HIL 测试外,我们还使用真实数据进行测试。例如,在实验室中使用真实数据回放驾驶测试过程中发生的错误。我们使用与 HIL 仿真中相同的测试系统硬件配置:SCALEXIO,Sensor Simulation PC,以及ESI Unit。对于数据回放,数据将由部署在 Sensor Simulation PC上的 RTMaps 控制回放。PC 将数据传输到 ESI 单元(摄像头原始数据)和 SCALEXIO 系统(总线通信,例如 CAN)。在那里,数据被缓冲,然后同步转换成控制单元所需的电信号。因此,测试系统硬件配置无需任何修改即可用于开环和闭环测试。
开发项目成功经验
借助 dSPACE 的仿真和验证解决方案,东软睿驰已成功验证并推出了多款 ADAS/AD ECU。它们应用于乘用车和商用车辆,例如卡车。其中一个经过验证的系统装有五个摄像头,并具有 360°全景视图,所有摄像头都通过 ESI Unit实现了数据注入。SIL 和 HIL 测试的简单复用发挥了很大作用。一方面,在功能开发早期阶段创建的测试也可用于 ECU 验证,而另一方面,功能开发人员可以将 SIL 测试成果用于 HIL 测试。已经开发的测试案例可以在 VEOS 和 SCALEXIO 仿真平台之间复用,并保持一致性。该项目还具有一项重要功能,即故障注入,其用于检查系统的可靠性,例如,出现噪声或基于像素或线条的颜色错误。这些故障可以自动或手动注入。ESI Unit在传感器接口和协议方面具有非常出色的灵活性,例如支持 Maxim GMSL1 和 GMSL2、TI FPD-Link III 和 MIPI CSI-2。因此,我们仅仅通过一个系统就能满足不同整车制造商 (OEM) 的要求以及供应商的特殊要求。为了在基于 AUTOSAR 的 ECU 上实现软件生成,我们使用了产品级代码生成器TargetLink,其强大的 AUTOSAR 功能简化了 AUTOSAR 兼容软件的创建工作。

dSPACE 解决方案的作用和评估
dSPACE 的解决方案由功能强大、高度逼真的仿真软件、HIL 仿真器、用于传感器仿真的高性能 PC 以及 ESI Unit 组成,它对于新 ECU 的验证起着十分关键的作用。在早期持续使用 SIL 和 HIL 方法以及数据回放可以帮助我们缩短软件开发周期并提高软件质量。这大大降低了成本,并为产品及时上市提供了保证。与之前没有使用 dSPACE 解决方案的项目相比,我们的总体效率提升了 70%。这意味着投资成本已得到很大程度的回报。
展望
东软睿驰目前正在开发更多的辅助功能,并进一步扩展自动驾驶系统的范围。我们与 dSPACE 密切合作,从而使验证解决方案适应新的要求。在数据记录层面,我们正评估数据记录系统 AUTERA 在工作效率提高方面的作用。dSPACE 最新开发的高保真度传感器仿真软件也即将投入使用,因为它可以提供具有真实光线和天气效果的高精度环境传感器仿真。
魏岩,东软睿驰
概览
基于摄像头的驾驶辅助系统验证
挑战
- 在不包含成像器芯片的情况下对基于摄像头的控制单元进行测试
- 将真实传感器原始数据注入给控制单元
解决方案
- 使用集成的 SIL/HIL 仿真平台
- 使用正确的物理模型高保真度地仿真摄像头原始数据
优点
- 轻松可复现的软件和控制单元测试
- 测试效率提升 70%
关于东软
东软为汽车、消费电子、移动设备、物联网、医疗、业务流程外包、金融、安全和保险、信息技术外包等行业提供一系列丰富的基于软件的服务、产品和预集成解决方案。东软在世界各地的员工超过两万人,遍布亚洲、欧洲、北美和中东地区。东软专注于软件技术,覆盖导航、ADAS、HMI、车联网、信息娱乐等领域,提供面向汽车行业的产品和解决方案。东软为全球众多汽车 OEM 和一级客户提供服务,包括北美、欧洲和亚洲等地区。东软睿驰汽车技术有限公司(简称“东软睿驰”)是一家创新型企业,专注于将移动互联网、人工智能、新能源技术应用于汽车行业。
作者简介:

魏岩
魏岩是中国沈阳东软睿驰汽车技术(沈阳)有限公司的 ADAS 负责人。
赵龙宁
中国沈阳东软睿驰汽车技术(沈阳)有限公司
吴迪
中国沈阳东软睿驰汽车技术(沈阳)有限公司
陈晓宇
中国沈阳东软睿驰汽车技术(沈阳)有限公司
丁楠
中国沈阳东软睿驰汽车技术(沈阳)有限公司