dSPACE FlexRay Configuration Package
FlexRayネットワークにおけるdSPACEシステムの設定
dSPACE FlexRay Configuration Packageは、dSPACEハードウェアをFlexRayネットワークのシミュレーションノードまたは監視ノードとして統合するために使用します。
- FlexRayシミュレーションの効率的な設定
- レストバスシミュレーションを含む、ラピッドコントロールプロトタイピングおよびHIL(Hardware-in-the-Loop)シミュレーションに対応
- エンドトゥエンド保護、セキュアオンボード通信、およびグローバル時間同期のサポート

適用分野
dSPACE FlexRay Configuration Packageは、dSPACEハードウェアをFlexRayネットワークのシミュレーションノードまたは監視ノードとして統合するために使用します。ノードは、FlexRayバス経由で送信される信号とフレームのスケジューリング情報を含む通信マトリクスに従い、dSPACE FlexRay Configuration Toolを使用して設定します。通信情報は、RTI FlexRay Configuration Blockset経由でMATLAB ® /Simulink ® モデルにリンクされます。作成されたFlexRayアプリケーションは、dSPACEシステム上で実行できます。
主な利用効果
dSPACE FlexRay Configuration Packageは、dSPACEのリアルタイムシステムでFlexRayを使用するための拡張ソリューションであり、dSPACE FlexRay Configuration ToolとRTI FlexRay Configuration Blocksetの2つの部分で構成されています。このパッケージはFlexRayの設定を容易にし、FlexRayの複雑さをほとんど意識せずに作業できます。設定はプロジェクトファイルとして保存や交換ができます。従来のGUI以外にも、自動化インターフェース(XMLファイルのインポート)を使用して、多数の設定作業を極めて効率的に行えます。
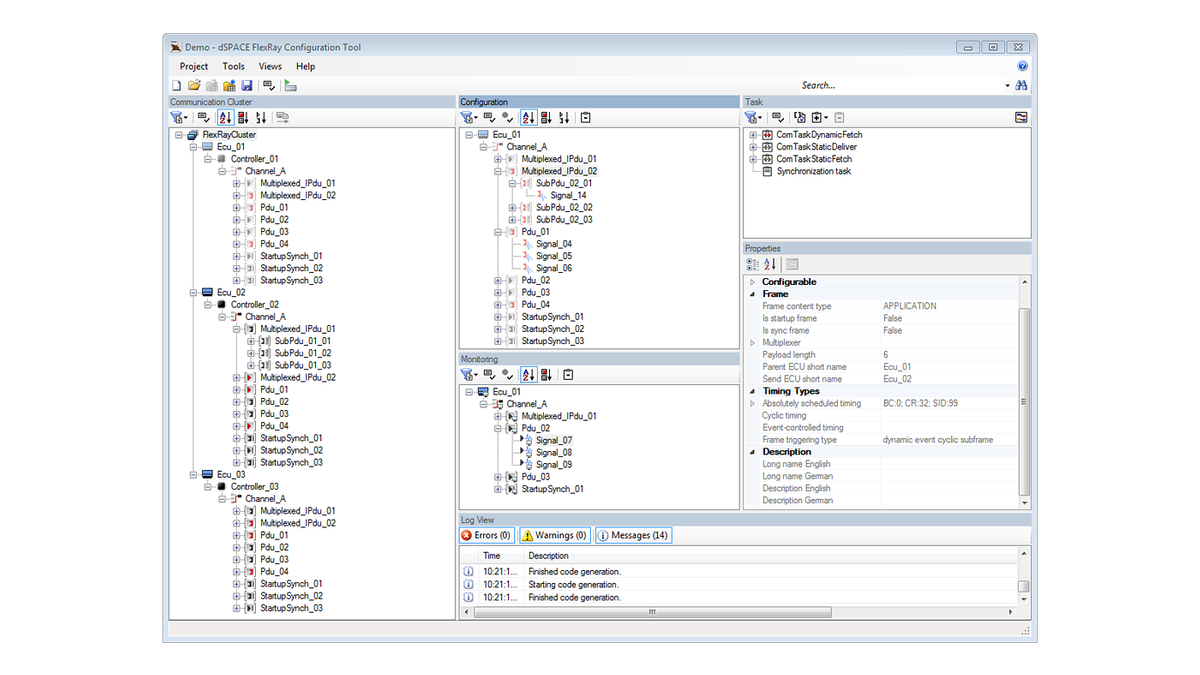
dSPACE FlexRay Configuration Tool
dSPACE FlexRay Configuration Toolは、dSPACEシステムをFlexRayネットワークのシミュレーションノードとして設定するためのツールです。このツールは、FIBEXまたはAUTOSAR XML形式のネットワークデータとスケジューリングデータを必要とします。通信記述をインポートすると、多数の整合性チェックが実行されます。各種のビューを使って、FlexRayの設定を簡単に管理できます。通信コードとコントローラ設定は、このツールを使って生成します。
RTI FlexRay Configuration Blockset
アプリケーション固有のSimulinkモデルは、RTI FlexRay Configuration Blocksetを使用して作成することができます。ブロックの属性には、dSPACE FlexRay Configuration Toolによって生成されたデータが使用されます。このブロックセットには、タスクの実行制御、割込みとエラー処理、ステータス情報、およびコントローラのリセットに使用できる追加のブロックセットが含まれています。RTI FlexRay Configuration Blocksetは、AUTOSARでも使用されるプロトコルデータユニット(PDU)の送受信をサポートしています。PDUは複数の信号で構成されており、この信号はPDU当たりSimulinkブロックを1つだけ使用してモデル内で処理できます。
dSPACEツールチェーンへの適用
FlexRayアプリケーションのさまざまな領域で、MicroAutoBoxからSCALEXIOハードウェアにいたるdSPACEハードウェアシステムを使用できます。これらのシステムには、FlexRay通信コントローラを搭載するモジュール用のスロットが装備されています。アプリケーションモデルは、dSPACEのRTIブロックセットと組み合わせて、MATLAB ® /Simulink ® を使って作成します。モデルは、ハードウェア上でリアルタイムに実行されます。モデルの実行とバスアクセスは同期化されています。結果は、ControlDeskなどの試験環境でビジュアル表示できます。
信号、PDU、およびフレームの選択
dSPACE FlexRay Configuration Toolは、ネットワークやシステムレベルのビューとノードやECU固有のビューの橋渡しをします。通信マトリクスやネットワーク記述ファイルのインポート後は、FlexRayネットワークの記述とスケジューリングデータが、見やすく配置された階層ビューで表示されます。この階層ビューは、追加の表示や並べ替えオプションと組み合わせることができます。さらに、シミュレーションで使用するすべてのPDU(Protocol Data Unit)を簡単に選択できます。1個のECUに対してレストバスシミュレーションをセットアップする場合は、対象のECUを選択して、そのECUに送信されたすべてのPDUをツールに検索させます。
自動化インターフェース
強力な自動化インターフェースを使用すると、すべての重要な設定を自動化でき、作業が極めて効率化します。設定ファイルは、既存のプロジェクトからエクスポートして新しいプロジェクトで再利用するか、またはドキュメントを使用して手作業で作成することができます。また、ユーザ固有のツールを用いて自動的に生成することも可能です。dSPACE FlexRay Configuration Toolを(自動的に)起動させると、設定情報がパラメータを通じて提供されます。このようにして、ツール全体を自動化することができます。
タスクスケジュールの作成
信号、FIBEX 2.xのフレーム、FIBEX 3.xおよびAUTOSARのPDUを選択し、タスクスケジュールを作成できます。スケジュールには、通信サイクルの静的な部分と動的な部分の両方にFlexRayフレームを送受信するための通信ルーチンが含まれています。また、機能モデルやレストバスシミュレーションモデルのアプリケーションタスクもカバーされています。タスクスケジュールは、通信ルーチンを配置する固定スキームに基づいて自動的に導き出されます。あるいは、すべてのタスクスケジュールを手作業で定義することもできます。手作業で定義する場合は、定義するタスクスケジュールの整合性を確認するために、バックグラウンドでさまざまなチェックが実行されます。3番目(最終)のタスクカテゴリは同期化タスクです。同期化タスクは、FlexRayバス上のグローバルタイムにタスクの実行を合わせるために、各アプリケーションサイクルの最後に実行されます。
コード生成
この設定ツールには、実際の通信コードおよびFlexRayコントローラの初期化設定を生成するために必要なすべての情報が渡されます。このツールでは、使用可能な通信バッファを計算に入れたFlexRayコントローラの必要数と、起動および同期化動作も計算します。コード生成ツールは、FlexRay用のNXP(Freescale)およびBosch E-Rayコントローラ実装をサポートします 1) 。
FlexRayモデルの作成
一種のプリプロセッサツールとして機能した設定ツールからの結果を使用して、通常のモデルベースの設計フローを続行することができます。FlexRayモデルを初めて作成する場合は、RTI FlexRay Configuration Blocksetライブラリのブロックがモデルにコピーされ、事前に生成された設定データに従って、自動的にパラメータの値が設定されます。この結果生成されるモデルフレームは、FlexRayネットワークおよびローカルタスクスケジュール全体のインターフェースとなります。このモデルフレームは、実際の機能モデルまたはレストバスシミュレーションモデルおよびライブラリの追加ブロックによって補完され、たとえばステータス情報を受け取ってエラー状況を処理するためなどに使用されます。
モデルの変更
車両開発プロジェクトの新しい統合段階に入り、通信記述ファイルへの修正作業がたいてい後から発生します。すでに行ったモデリング作業の結果を保存するために、RTI FlexRay Configuration Blocksetには、信号やPDUブロックの新規導入や破棄など設定データの変更を処理するためのアップデート機能が付属しています。作成されたFlexRayアプリケーションモデルは、dSPACEハードウェアシステム上でコンパイルされて実行されます。設定ツールのドライバと初期化コードは、このビルドプロセス中に組込まれます。生成されたコードは、dSPACEハードウェアにダウンロードされ、FlexRayネットワーク内で完全なノードとして機能し、FlexRayフレームをリアルタイムに送受信します。
欠陥シミュレーション方法
- 欠陥生成とFlexRayコントローラの再起動
- 静的フレーム送信の有効化/無効化
- 周期的な動的FlexRayフレーム送信の有効化/無効化
- すべてのイベントベースの動的FlexRayフレームの有効化/無効化
- すべての周期的FlexRayフレームの有効化/無効化(ヌルフレームまたは古い値が送信される)
- TRCファイルを介した稼働カウンタの操作
- 実行時のCRCアルゴリズムの変更
- 不正な信号の送受信
- 同期化サービスの障害をシミュレート
- 時間によってトリガされるタスク実行の障害をシミュレート(正しい同期状態での再起動オプションあり)
| 機能 | 説明 |
|---|---|
| 通信記述のインポート |
|
| 操作 |
|
| 信号とフレームの選択 |
|
| PDUの処理 |
|
| フレーム処理 |
|
| タスクの設定 |
|
| AUTOSAR機能のサポート |
|
| モデルの生成 |
|
| シミュレーション段階 |
|
- MicroAutoBox II リアルタイムハードウェア、入出力、およびシグナルコンディショニングを備えた小型スタンドアロンプロトタイピングシステム
- MicroAutoBox III 小型で堅牢な車載プロトタイピングシステム
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き