Real-Time Interface(RTI)
dSPACEハードウェア上でモデルを稼動させるための実装ソフトウェア
RTIを使用することで、開発者は実際の設計プロセスに完全に集中し、また設計作業を迅速に繰り返し行うことができます。RTIはCコード生成ツールSimulink Coder™(旧称、Real-Time Workshop ® )を拡張し、リアルタイムハードウェア上でのSimulinkおよびStateflowモデルのシームレスな自動実装を実現します。
- dSPACEハードウェアへのMATLAB ® /Simulink ® /Stateflow ® モデルの実装
- コードの自動生成
- 包括的なSimulinkブロックライブラリを経由したGUIによる入出力の構成

適用分野
ラピッドコントロールプロトタイピング時やHIL(Hardware-in-the-Loop)シミュレーション時、Real-Time Interface(RTI)は、dSPACEハードウェアと開発ソフトウェアMATLAB/Simulink/Stateflow(MathWorks ® 社)の間のリンクを提供します。
RTIでの作業
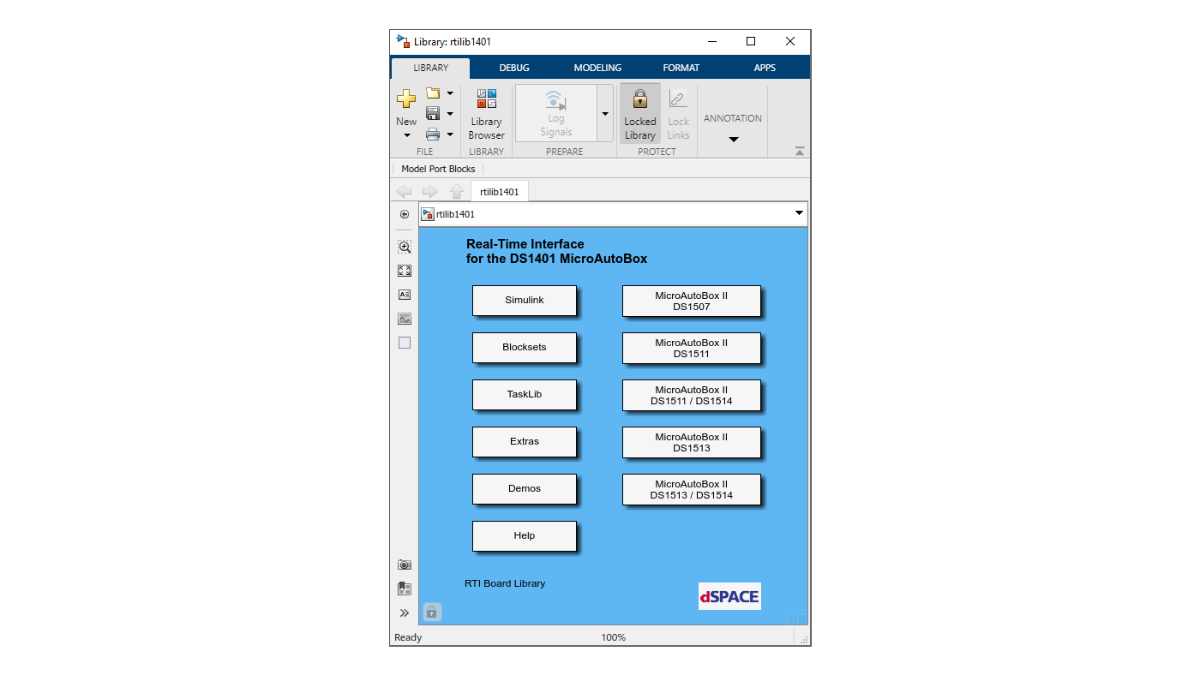
モデルをdSPACE I/Oボードに接続するには、RTIブロックライブラリから入出力モジュールをドラッグアンドドロップしてSimulinkブロックに接続します。パラメータ設定などすべての設定は、適切なブロックをクリックして行うことができます。RTIはSimulinkモデルにdSPACEシステムの入出力機能を実装するブロックを提供し、Simulink Coder™(旧称、Real-Time Workshop ® )はモデルコードを生成することにより、リアルタイムアプリケーション向けのモデルを準備します。開発者が1行もコードを書くことなく、リアルタイムモデルがリアルタイムハードウェア上で自動的にコンパイル、ダウンロードされ、起動されます。RTIはユーザの設定作業をサポートします。RTIでは整合性チェックが行われるため、ビルドプロセスの前または最中に潜在的なエラーを特定および修正することができます。
包括的な機能
RTIは、連続系、離散系、およびマルチレートシステムなどあらゆる種類のシステムを処理します。入出力ハードウェアにより、同じI/Oボード上でチャンネルごとにサンプリングレートを変えることができます。さらに、異なるサブシステムで使用することも可能です。RTIは非同期イベントをサポートしているため、割込み駆動型のサブシステムを実行するときに、タスク優先度やタスクオーバーラン方式を設定できます。また、時間駆動型のタスクとタイムテーブルもサポートしているため、タスクおよびタスクのグループに対し、関連付けられたトリガイベントに関して、可変のまたはあらかじめ設定された遅延時間を実装することができます。これにより、モデルのタスクを非常に柔軟に処理することが可能です。さらに、RTIはチャンネルの二重使用や誤った使用を防止するために役立つチェック機能も提供します。
主な利用効果
RTIを使用することで、開発者は実際の設計プロセスに完全に集中し、また設計作業を迅速に繰り返して行うことができます。RTIはCコード生成ツールSimulink Coder™(旧称、Real-Time Workshop ® )を拡張し、リアルタイムハードウェア上でのSimulinkおよびStateflowモデルのシームレスな自動実装を実現します。これにより、実装時間は大幅に短縮されます。RTIはハードウェアの設定手順を段階的に示し、自動整合性チェックを実施して、パラメータ設定のエラーを回避します。高い柔軟性を実現するために、RTIの各バージョンでは複数の異なるMATLABリリースをサポートしています(www.dspace.jp/goto.cfm/ja_0906を参照)。RTIの新しいバージョンを使用することにより、MATLABおよびRTIの以前のリリースのほとんどのモデルを自動的に移行できます。
モデルの設計
次の例では、ハードディスクドライブの磁気ヘッド位置決めシステムのクローズドループ制御をブロック線図で示します。コントローラも制御対象となるシステムのモデル(プラントモデル)もMATLAB/Simulink開発環境で設計されます。
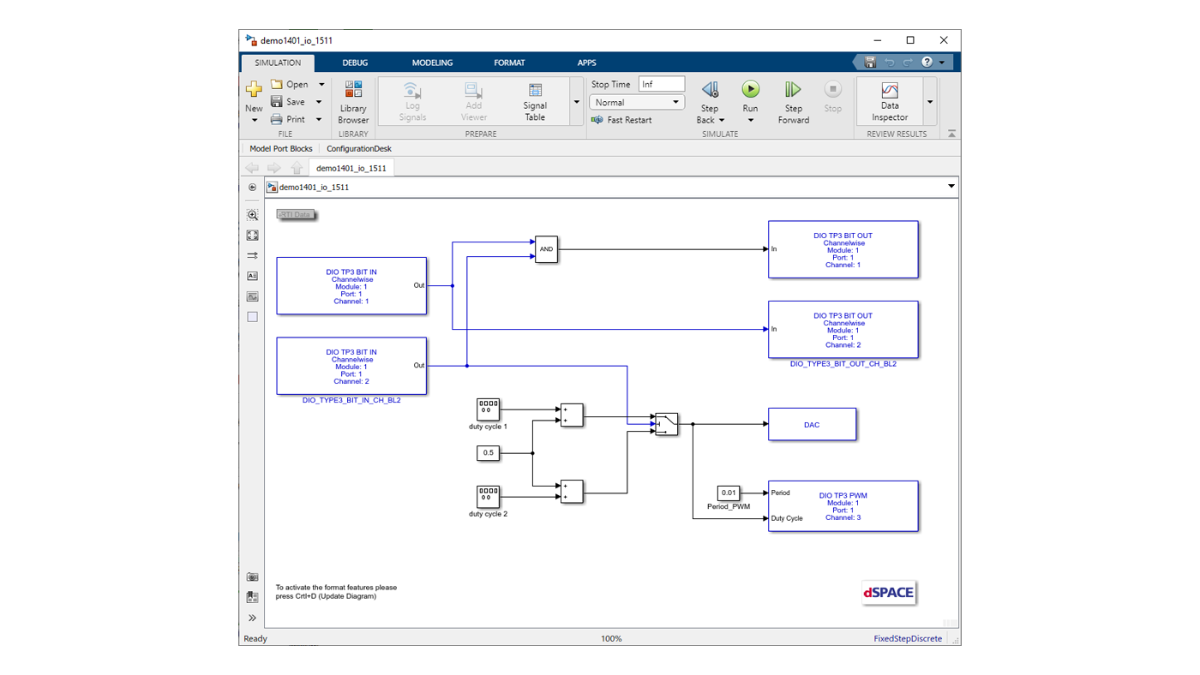
GUIによる入出力の構成
Simulinkでモデルのテストを行った後、リアルタイムハードウェア上で実装する準備を行う必要があります。プラントモデルは、制御対象となる実際のシステムへのインターフェースを形成する入出力ブロックと置き換えます。入出力モデルは、RTI入出力ライブラリからブロックを選択してモデルにドラッグし、コントローラの入出力に接続するだけで追加できます。
パラメータの指定
入出力パラメータは、GUIから入出力ブロックをダブルクリックし、データを入力して指定します。この例では、入力信号はフィードバック値と基準信号です。基準信号は、外部の信号ジェネレータから入力され、ADCブロックによって読み取られます。コントローラからの出力信号は、制御信号u_Mで、DACブロック経由でハードウェアによって出力されます。
dSPACEハードウェアでの実装
dSPACEハードウェアでのSimulinkモデルの自動実装は、迅速な反復設計にとって重要です。RTIを使用する場合、実装プロセス中にコードは1行も見る必要がありません。[Build]ボタンをクリックするだけで、コードの生成、コンパイル、およびダウンロードをはじめとする実装プロセスが開始されます。[Configuration Parameters]ダイアログのソルバーページでは、積分アルゴリズムとステップサイズを選択できます。スクリプトによって、ビルド手順も自動化できます。これは、規模が大きいモデルでは特に便利です。
試験ソフトウェアとの連係
アプリケーションをリアルタイムハードウェア上で実行している場合は、dSPACE試験ソフトウェア全体を自由に操作できます。RTIにより、実装プロセス直後から個々の変数を操作することができます。
ControlDeskは、コードを再生成することなく、パラメータの変更と信号の監視を実行できる計器パネルを提供します。ControlDeskは、アプリケーションが使用する任意の変数の時間履歴も表示します。
dSPACEハードウェアのサポート
DS1104 R&D Controller Boardを搭載したdSPACEシステム、MicroAutoBox II、またはMicroLabBoxをご使用かどうかに関わらず、RTIによりモデルとdSPACEシステムの入出力の設定を簡単に行うことができます。
|
ブロックセット |
説明 |
詳細について (該当する製品情報を参照してください) |
|
Real-Time Interface for Multiprocessor Systems |
|
|
|
RTI Bypass Blockset |
|
|
|
CANブロックセット |
|
|
|
RTI LIN MultiMessage Blockset |
|
|
|
dSPACE FlexRay Configuration Package |
|
|
|
RTI FPGA Programming Blockset |
|
|
|
Ethernetブロックセット |
|
|
|
RTI Electric Motor Control Blockset |
|
|
|
RTI DS1552 I/O Extension Blockset |
|
|
|
RTI RapidPro Control Unit Blockset |
|
|
|
RTI USB Flight Recorder Blockset |
|
– |
|
RTI Watchdog Blockset |
|
|
|
RTI Synchronized Time Base Manager Blockset |
|
– |
| 機能 | 説明 |
|---|---|
| I/O設定 |
|
| リアルタイムコードの生成 |
|
| タスクの自動定義 |
|
| コンパイラの起動 |
|
| アプリケーションのロードと起動 |
|
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き