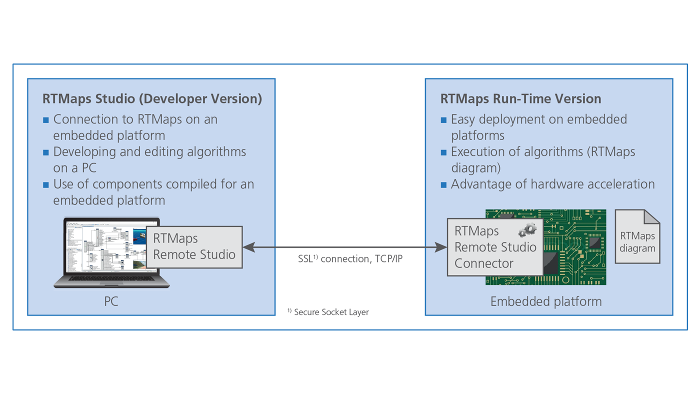
Develop and implement multi-sensor applications on embedded targets, and capture, visualize, and replay data.
Reduced Software Development Complexity
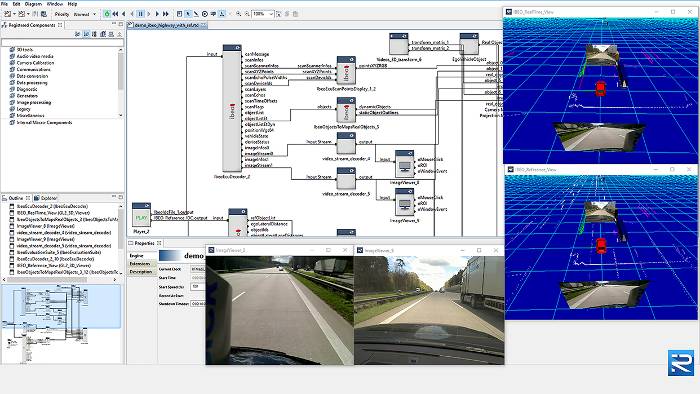
Easy integration of different sensor data streams via drag & drop
Interoperability with ROS
Easy communication with ROS nodes and networks
ISO 26262 Certification
Coming soon: Simplify the homologation process using ISO 26262 ASIL B certification
600+ Sensor and I/O Components
Accelerate your development using professionally developed and maintained components
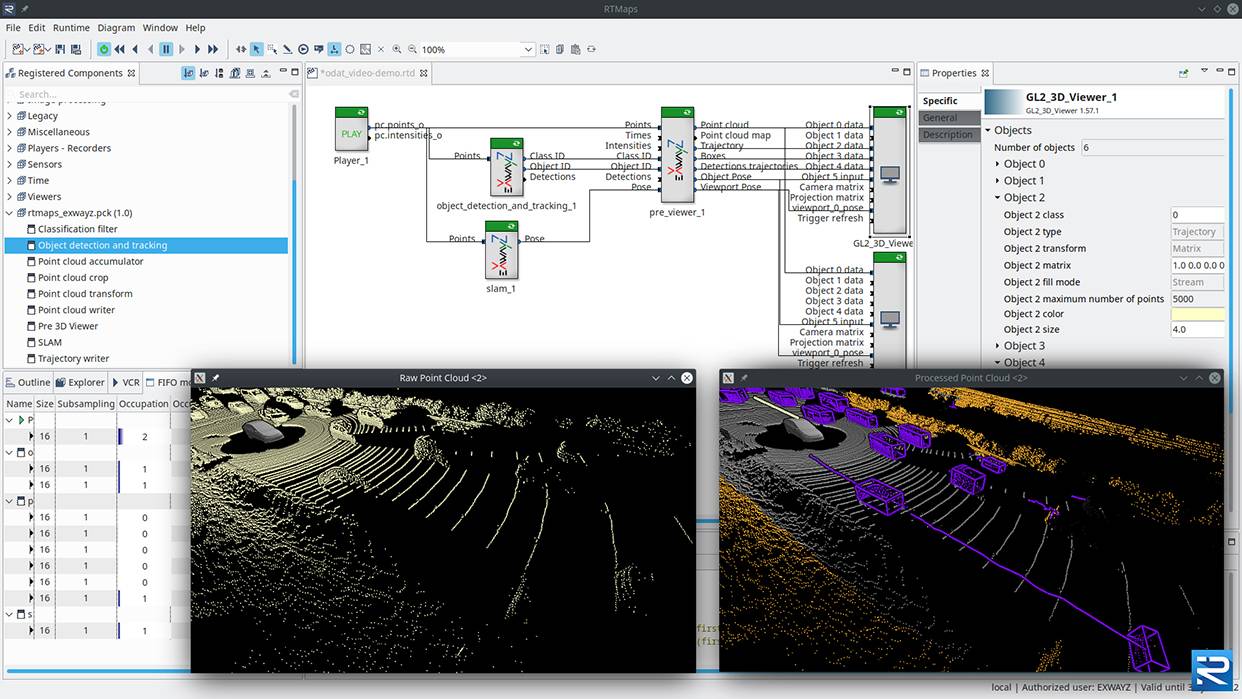
What is RTMaps?
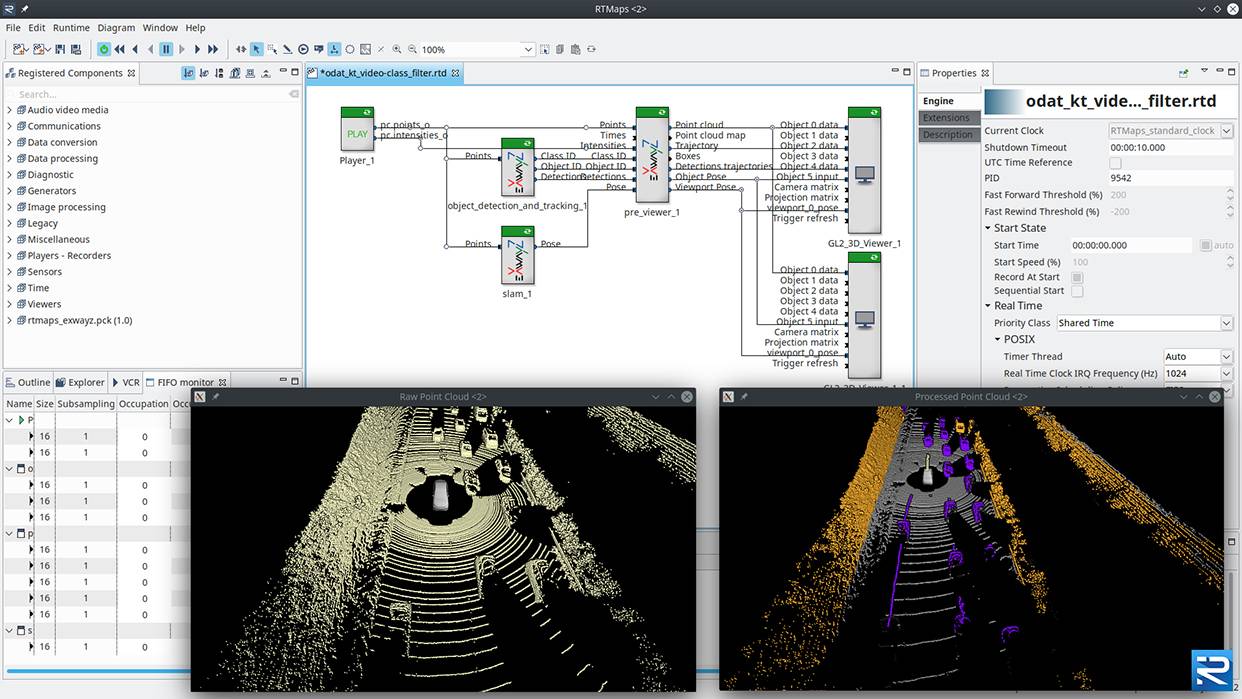
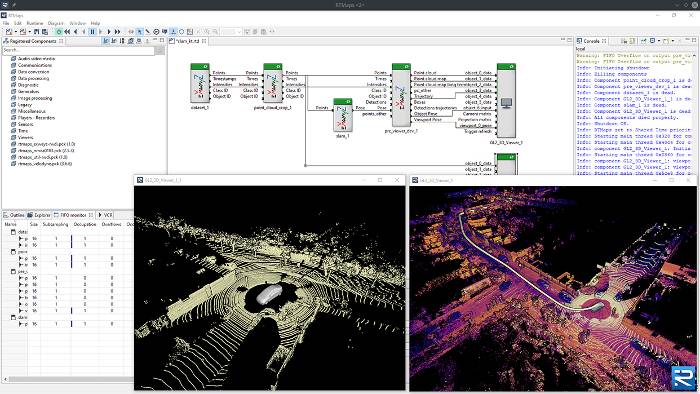
Realtime Multi-sensor applications (RTMaps ) is a multisensor software framework for data logging & replay, software development, and real-time execution. RTMaps offers:
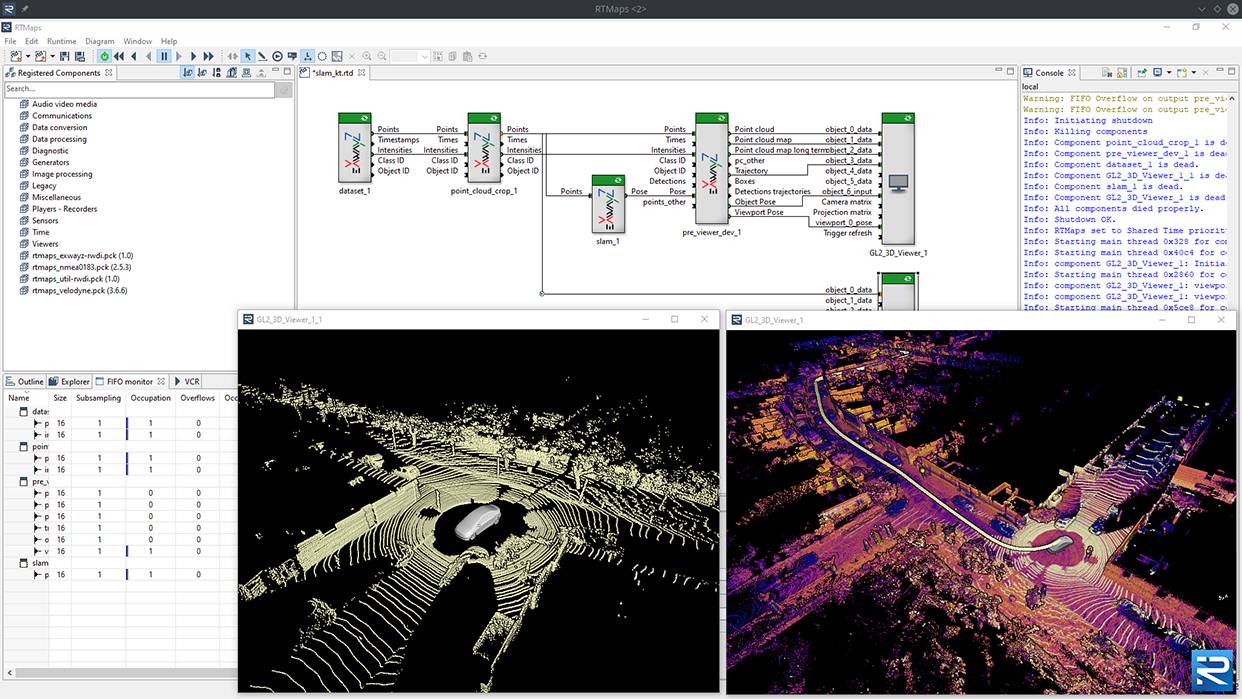
- Drag & drop component-based development
- Zero-copy communication
- Low memory and CPU overhead
- No loss of data
Application Areas
Multisensor applications play an essential role in many industrial and other areas. Some typical examples are:
- Automotive
- Agriculture
- Mining trucks
- Shuttles
- Aerospace
- Railways
Typical tasks that can be conveniently processed with RTMaps are:
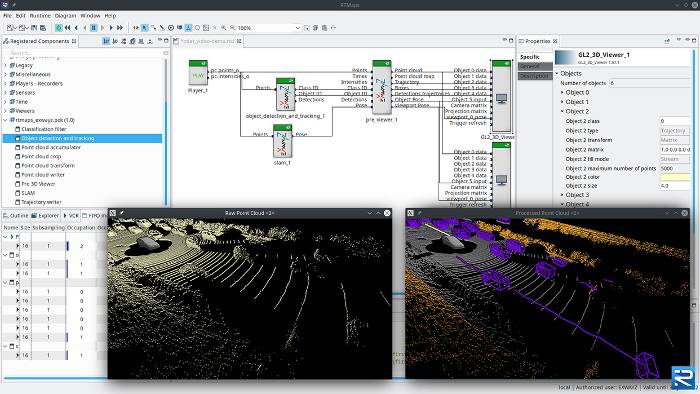
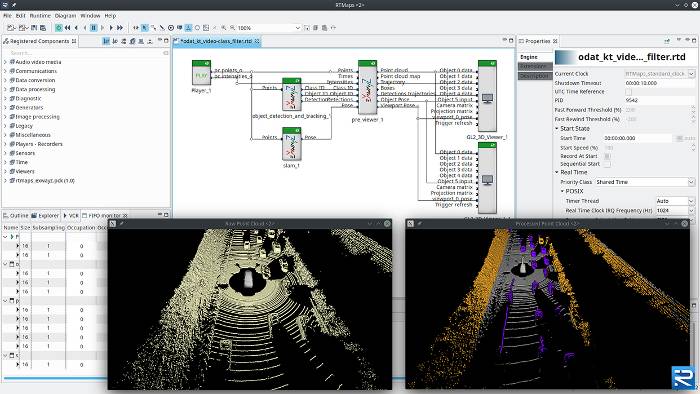
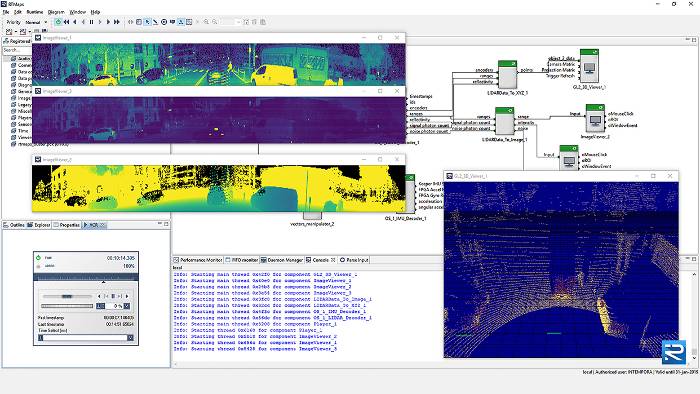
- Data capture
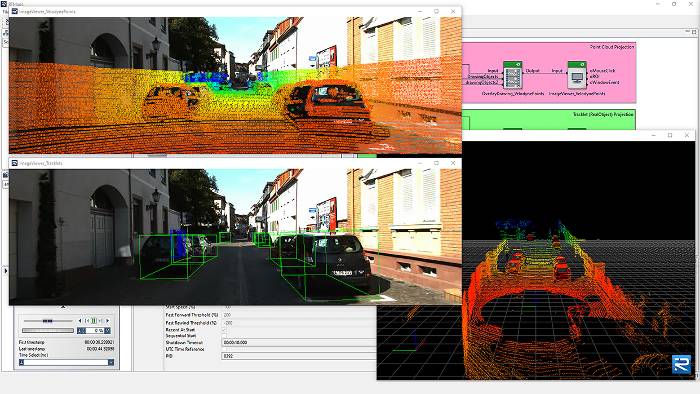
- Data visualization
- Software development
- Data replay
Key Benefits
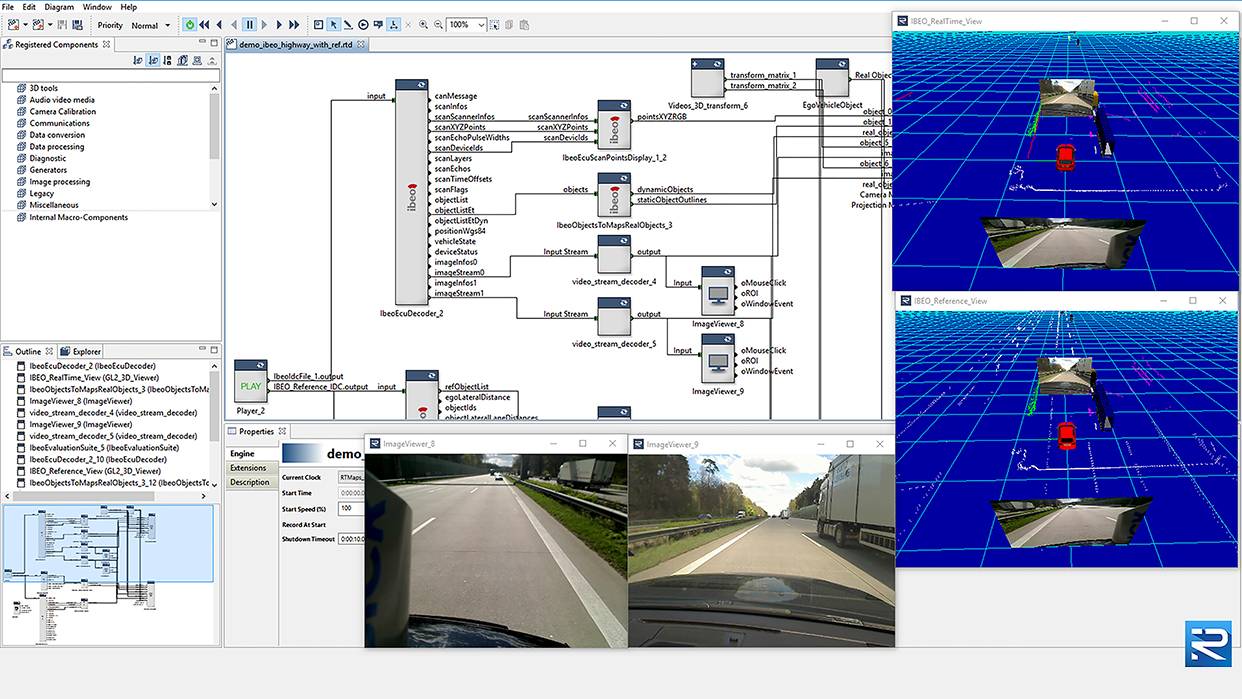
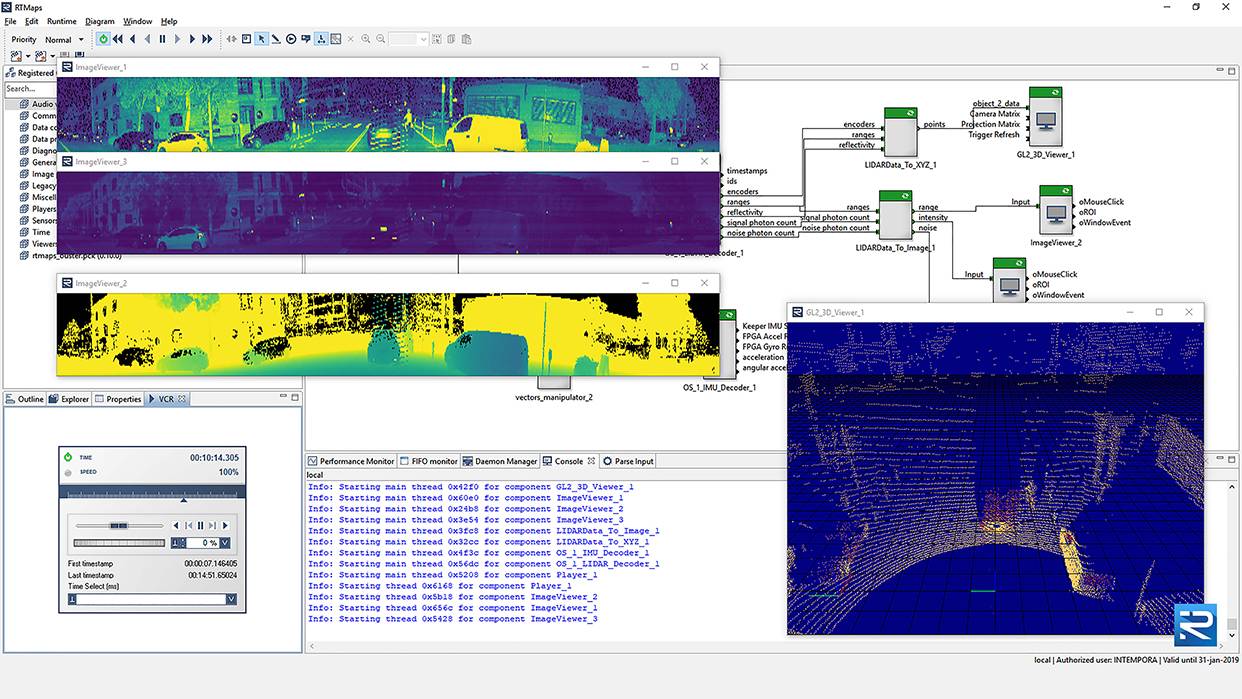
With RTMaps, data is acquired asynchronously and each data sample is captured along with its time stamp at its own genuine pace. This ensures that all data is time-correlated. The unparalleled performance of RTMaps on multicore CPUs enables users to get the most out of their computing architectures and easily set up applications that handle multiple, high-bandwidth data streams, including real-time processing and data fusion (sensor fusion). Sensor data can be recorded and played back synchronously for offline development and testing under reproducible conditions and faster than in real time.
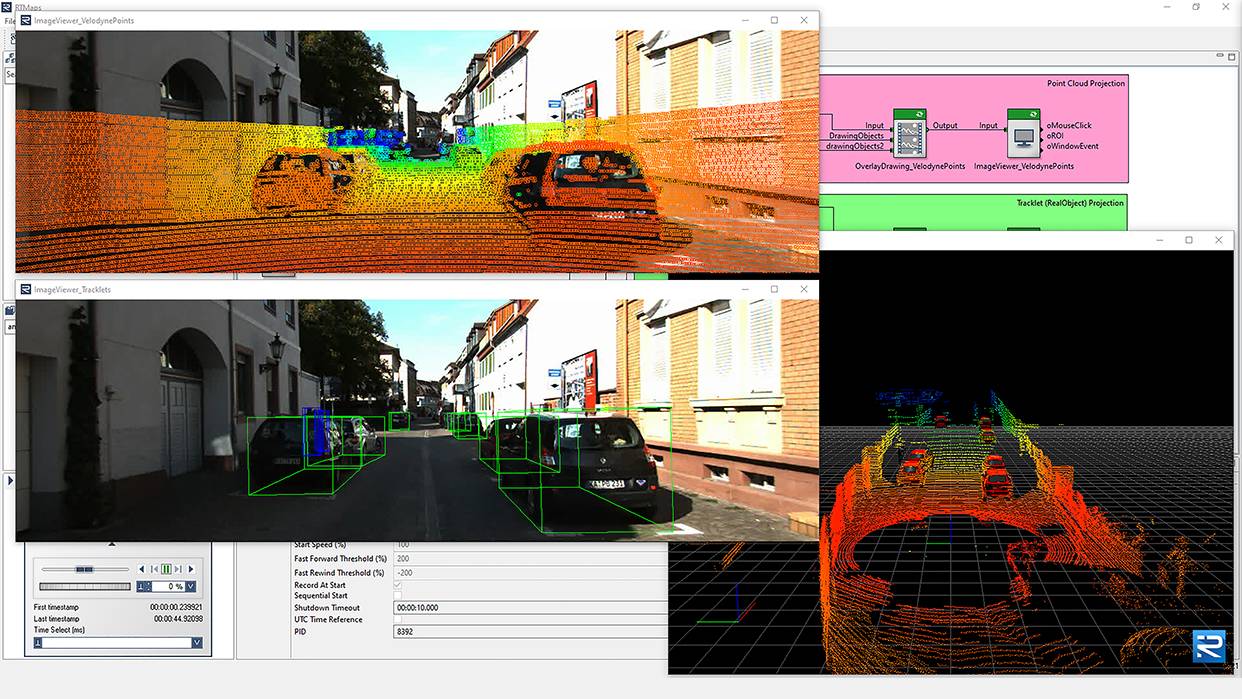
RTMaps provides comprehensive component libraries for automotive sensors, buses, and perception algorithms. It also supports any type and number of sensors and actuators (see complete list of supported technologies). Algorithms can be developed easily by means of block diagrams or by integrating own code using dedicated software development kits for C++ and Python. It is even possible to process data on multiple distributed platforms while preserving time coherency and synchronization of heterogeneous data streams.

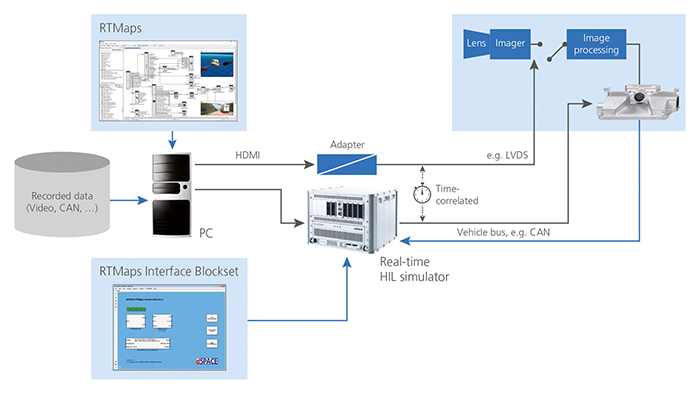
Integration into the dSPACE Tool Chain
RTMaps is tightly integrated into the dSPACE tool chain. For this, dSPACE provides an interface blockset designed specifically for dSPACE VEOS. RTMaps is the configuration and run-time environment for dSPACE AUTERA Data Logger and dSPACE Data Replay, and dSPACE TargetLink can be used to integrate production code generated from Simulink. Additionally, dSPACE ControlDesk can be connected to RTMaps to monitor and parameterize components that are implemented and processed in RTMaps.

Functionality Overview
Functionality Overview
| Functionality | Description |
|---|---|
| General |
|
| Supported sensors, communication buses, and protocols |
|
| Supported algorithms for developing functions for autonomus driving |
|
| Supported operating systems and platforms |
|
| Targeted applications |
|
Optional Products



What our customers say
Using RTMaps middleware and SBG Systems, we are able to efficiently design reliable, optimized localization and navigation algorithms for the redundant, real-time systems that drive our autonomous trucks, flatbeds, and shuttles.

RTMaps这款工具可以轻松、高效同步诸多ADAS传感器的数据,如雷达、摄像头、ADASIS v3.0地图、GNSS等。这对我们来说至关重要,因为我们正在为自动驾驶系统开发复杂的导航解决方案。多亏了RTMaps,我们利用它进行了很多国家项目的研发。

RTMaps 是一款理想的软件,它能捕获传感器的测量值,并精准地添加时间戳,然后同步、处理和转发。

我们使用 RTMaps 控制众多、复杂的传感器数据,并且能通过有针对性、同步的方式使用此数据有效地开发和验证我们的算法。

Using RTMaps improves the efficiency of algorithm development by more than 50%. This shortens the time to market.

The graphical development environment based on block diagrams makes it easy to recognize the entirety and details of the main program and subprograms, reducing software errors and allowing system design, verification, and utilization in a short time. Signal monitoring is relatively simple, even when the number of sensors and their connection points is large.