RTMaps 接口模块组
通过多传感器应用程序和硬实时控制器实现全栈原型开发
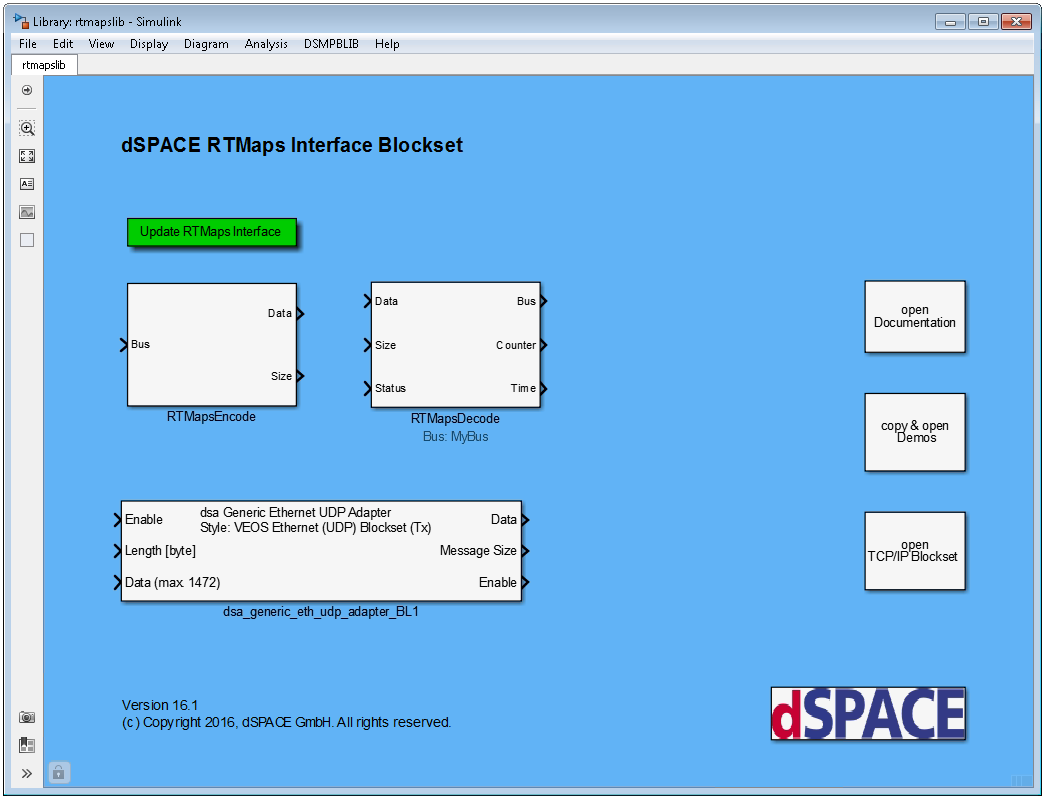
利用Simulink®的dSPACE RTMaps Interface Blockset,能够在Intempora的RTMaps 和dSPACE实时系统(或基于PC的仿真平台dSPACE VEOS)之间实现双向低延迟UDP/IP通信。
- 用于在dSPACE平台和RTMaps之间进行低延迟通信和时钟同步的Simulink模块集
- 时间相关数据的记录和回放
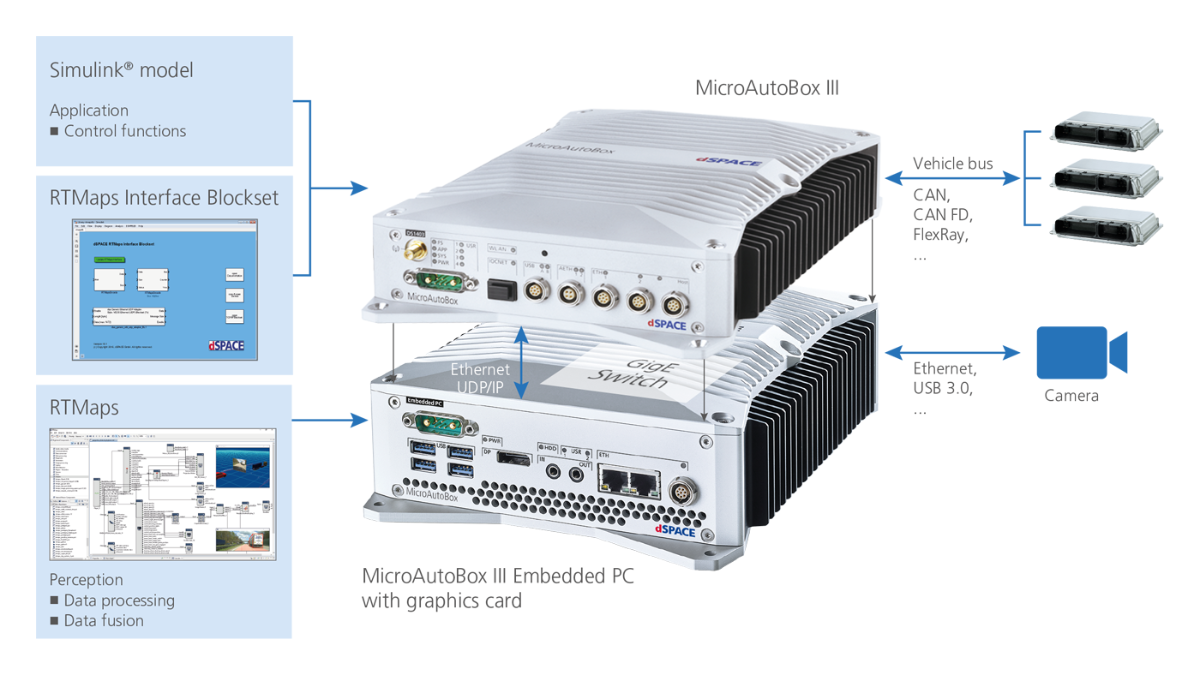
- ADAS和自动驾驶应用程序的轻松开发
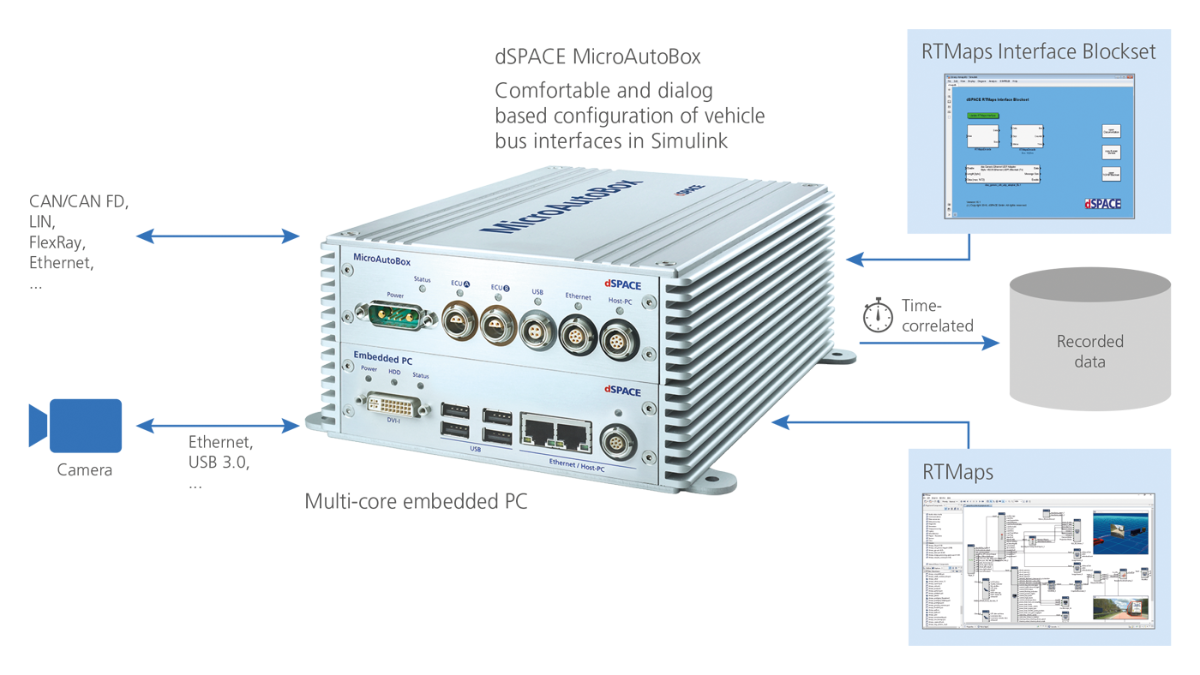
Recording and time correlation of camera and vehicle bus data.
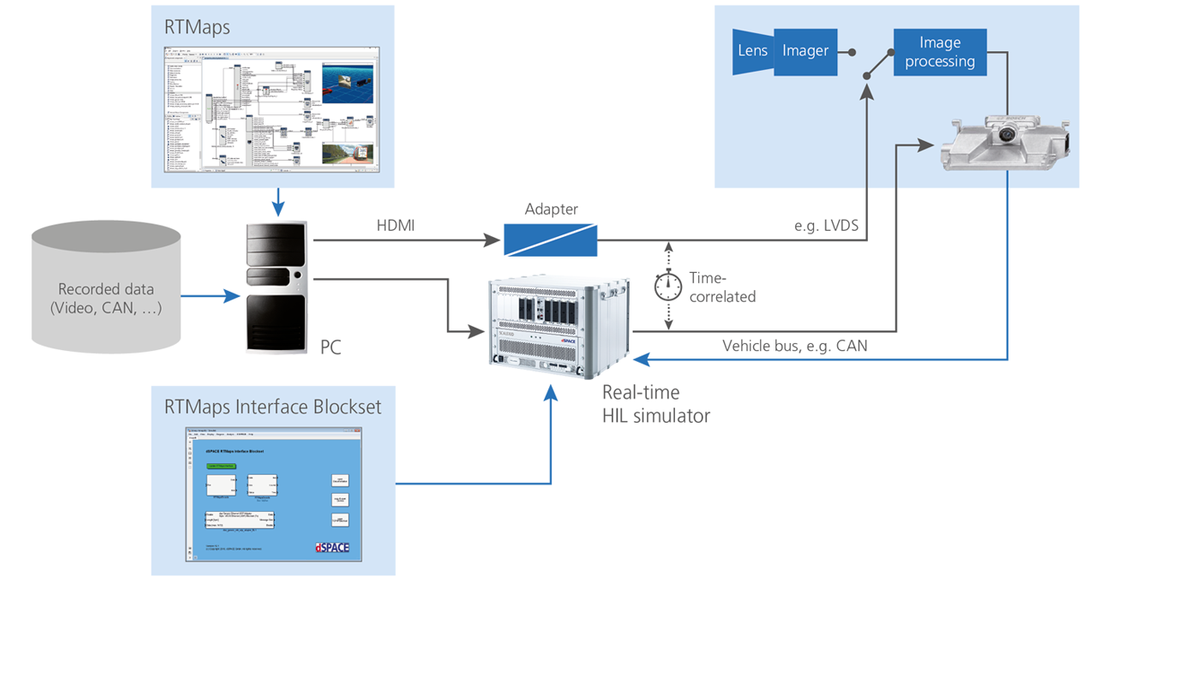
Open-loop HIL tests of electronic control units for image processing.



应用领域
传统的车辆软件栈具有一定的局限,因为基于硬实时控制器的原型开发已不足以满足高级驾驶辅助系统和自动驾驶(ADAS/AD)的要求。因此,原型开发出现了两个方向,一个致力于感知和数据融合,另一个致力于硬实时执行。
通常数据处理和融合算法在诸如C++的高级编程语言中实现,而应用功能的开发依赖于基于模型的设计方法,使用MATLAB®/Simulink®和dSPACE实时系统。Intempora的RTMaps是一款成熟的工具,并且具有非凡的性能,能够使用模块框图来进行基于C++的多传感器应用的原型开发。此外,RTMaps能够精确地进行时间戳标记、记录和回放数据。
dSPACE RTMaps Interface Blockset 通过UDP/IP将dSPACE平台(如dSPACE实时系统或VEOS)与RTMaps连接起来。
主要优点
dSPACE RTMaps Interface Blockset通过 Intempora 的 RTMaps 与 dSPACE 实时系统或基于 PC 的仿真平台VEOS之间的 UDP/IP提供双向低延迟通信。只需几个步骤,开发人员就可以通过信号总线将Simulink中的应用程序连接到相应的通信模块,并在RTMaps中建立到多传感器应用程序的数据连接。按一下按钮,Simulink中相应的信号总线就会将要发送或接收的数据所需描述以XML文件的形式生成。此外,通过模块集还能将RTMaps中的时钟与dSPACE平台上的仿真时间或实时时钟同步。例如,就可以在dSPACE MicroAutoBox上捕获、记录和精确地时间关联车辆总线数据以及在RTMaps中捕获的摄像头数据。另一个应用案例是用于图像处理的ECU的开环(数据回放)测试。在这个用例中,PC上的RTMaps 用于回放与时间相关的视频和总线数据,同时总线信号被发送到硬件在环(HIL)系统。这确保了无抖动的残余总线仿真。
RTMaps Interface Blockset 在RTMaps和dSPACE平台之间建立了强大的连接,并促进了ADAS和自动驾驶感知和应用算法的开发和测试。
| Functionality | Description |
|---|---|
| General |
|
| Ethernet communication |
|
-
- 在线观看
- 下载
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。