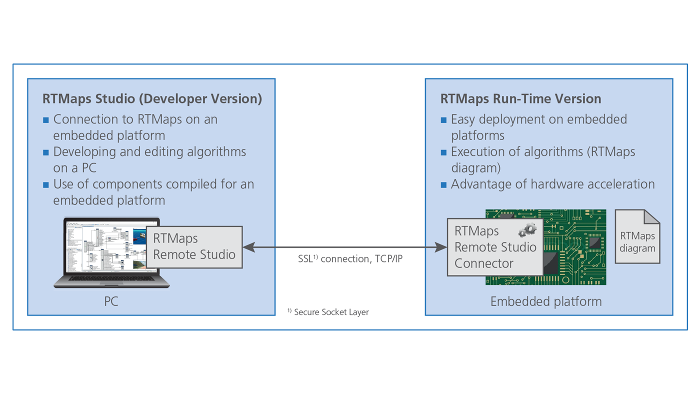
Develop and implement multi-sensor applications on embedded targets, and capture, visualize, and replay data.
Reduced Software Development Complexity
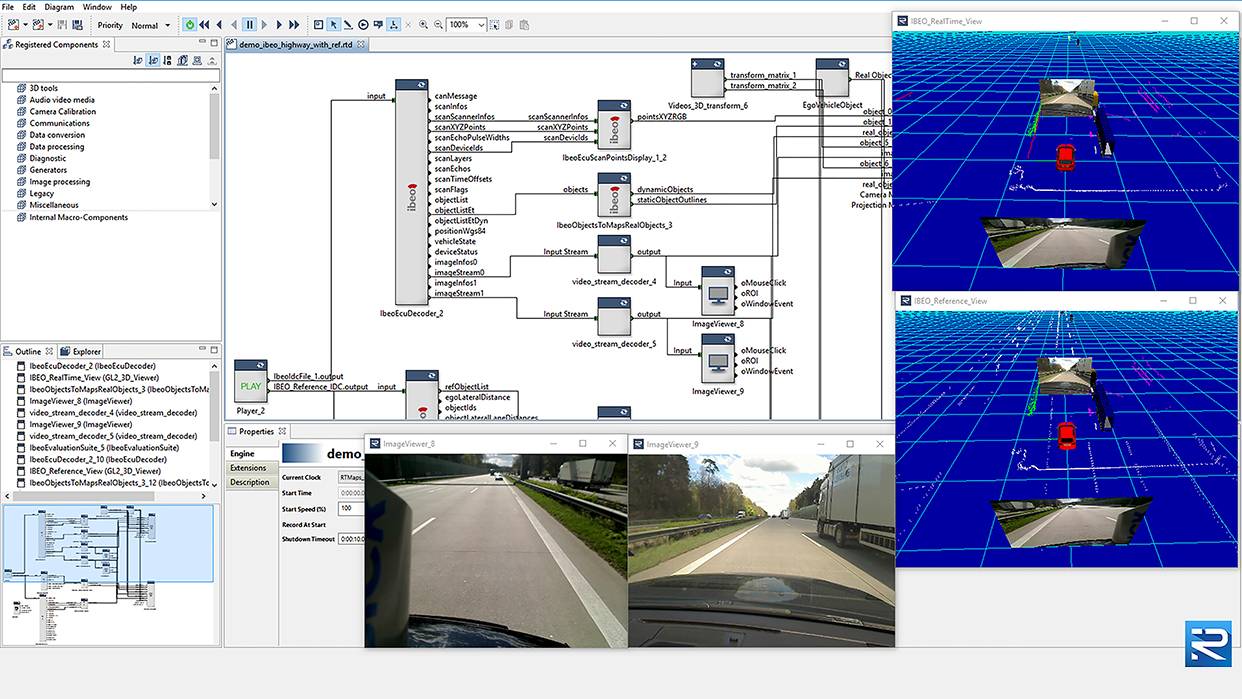
Easy integration of different sensor data streams via drag & drop
Interoperability with ROS
Easy communication with ROS nodes and networks
ISO 26262 Certification
Coming soon: Simplify the homologation process using ISO 26262 ASIL B certification
600+ Sensor and I/O Components
Accelerate your development using professionally developed and maintained components
What is RTMaps?
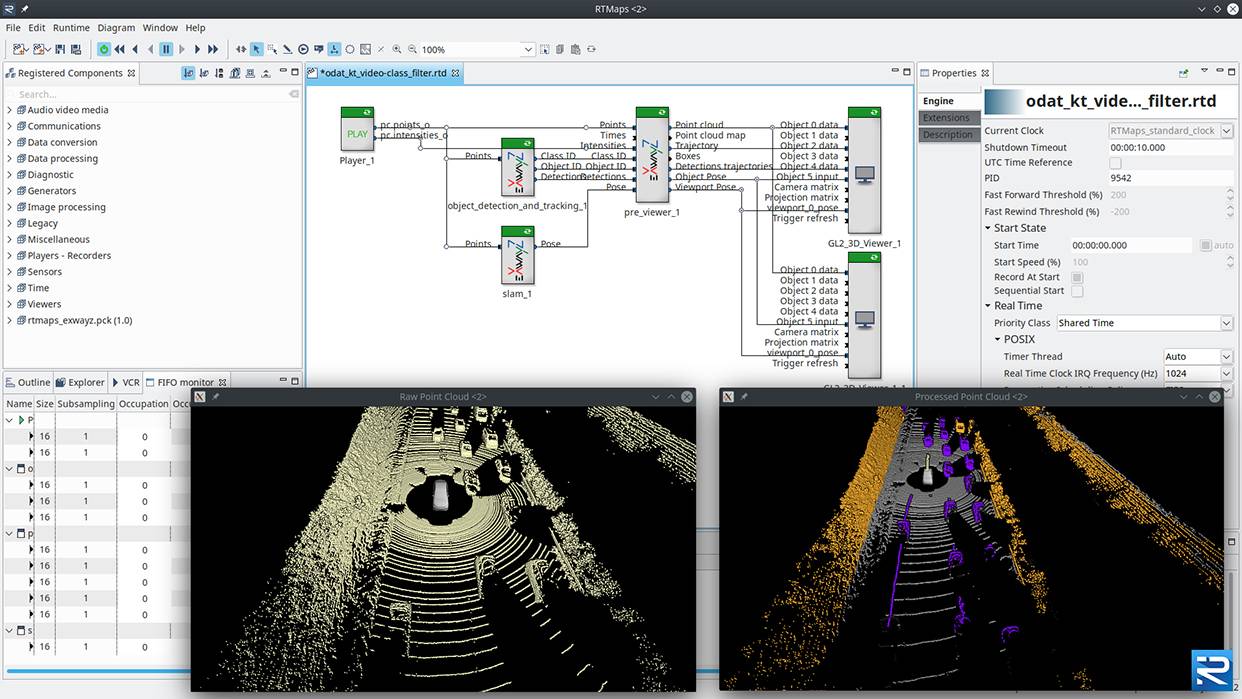
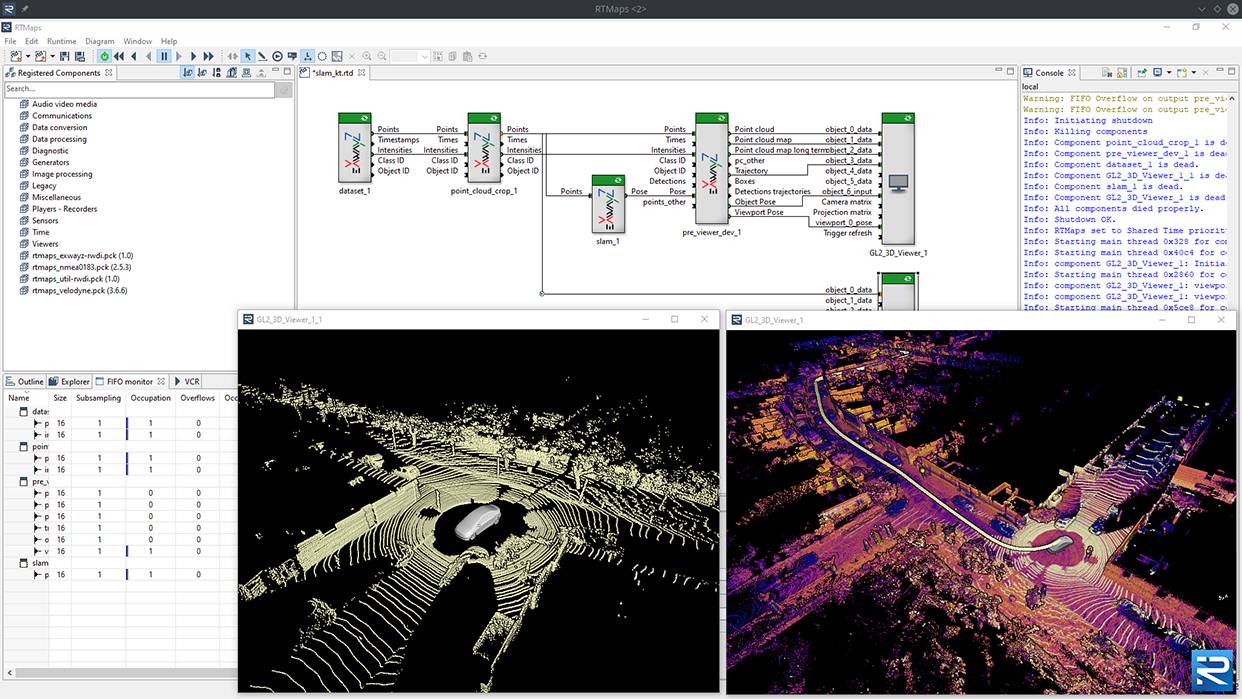
Realtime Multi-sensor applications (RTMaps ) is a multisensor software framework for data logging & replay, software development, and real-time execution. RTMaps offers:
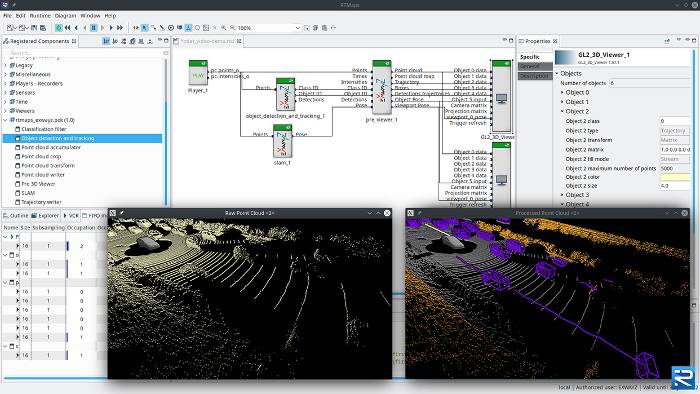
- Drag & drop component-based development
- Zero-copy communication
- Low memory and CPU overhead
- No loss of data
Application Areas
Multisensor applications play an essential role in many industrial and other areas. Some typical examples are:
- Automotive
- Agriculture
- Mining trucks
- Shuttles
- Aerospace
- Railways
Typical tasks that can be conveniently processed with RTMaps are:
- Data capture
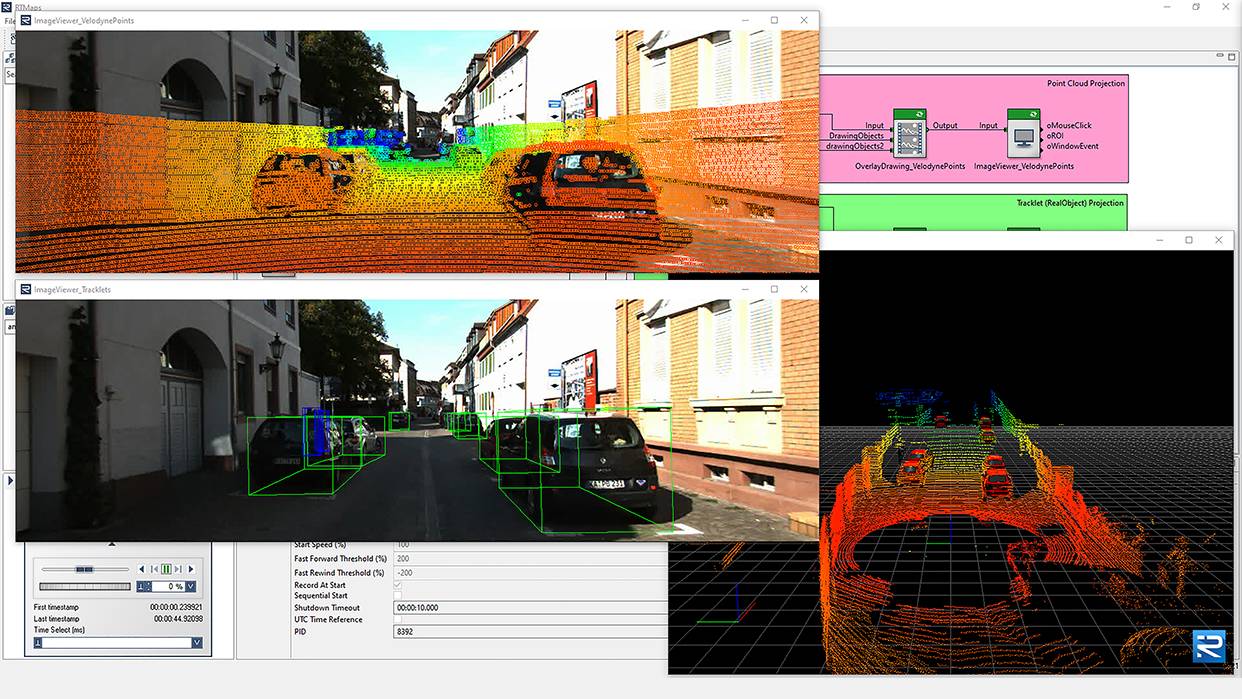
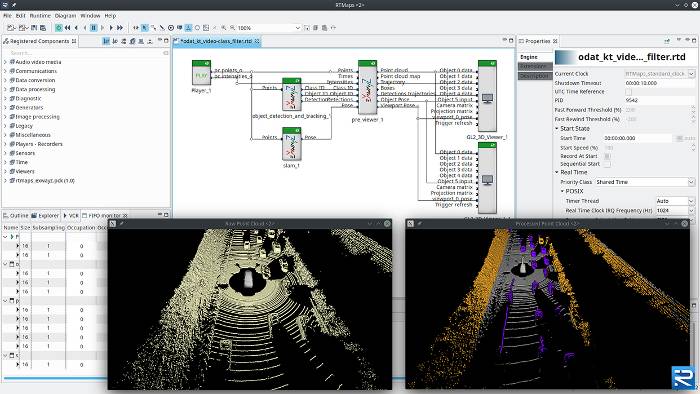
- Data visualization
- Software development
- Data replay
Key Benefits
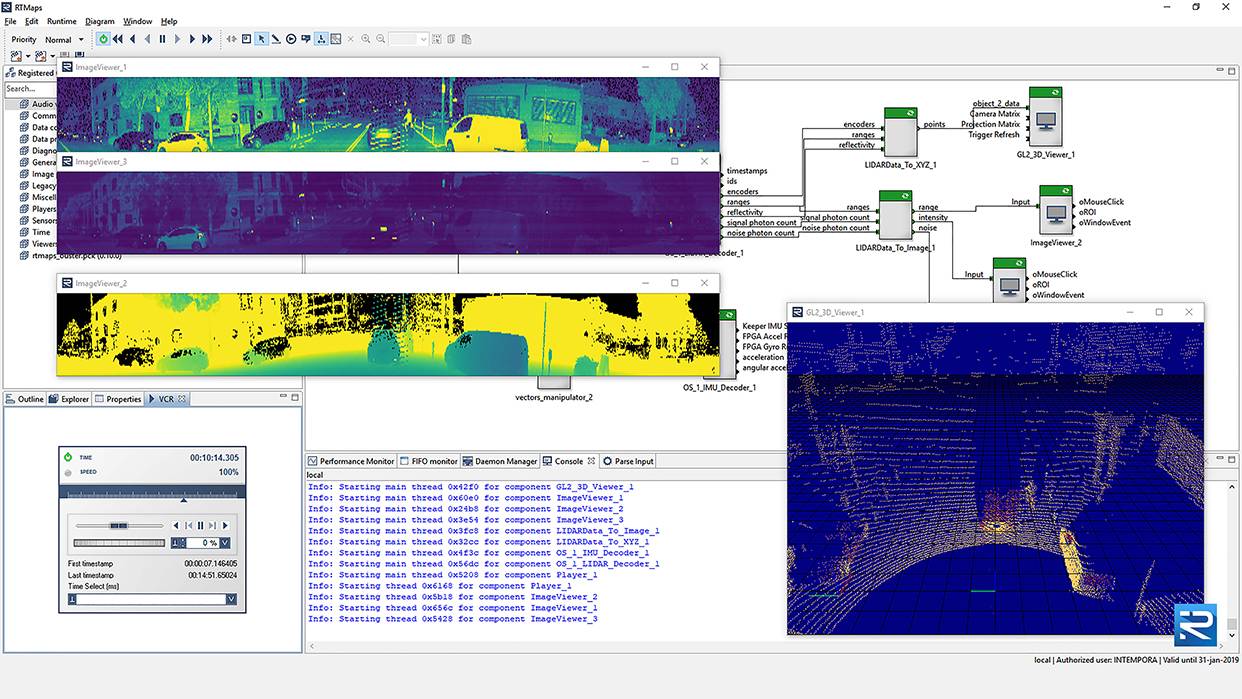
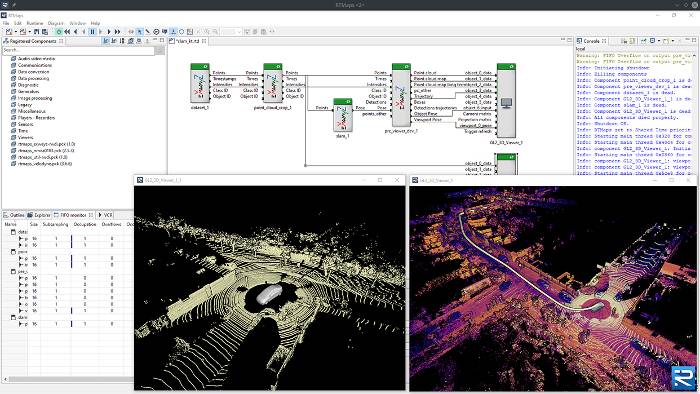
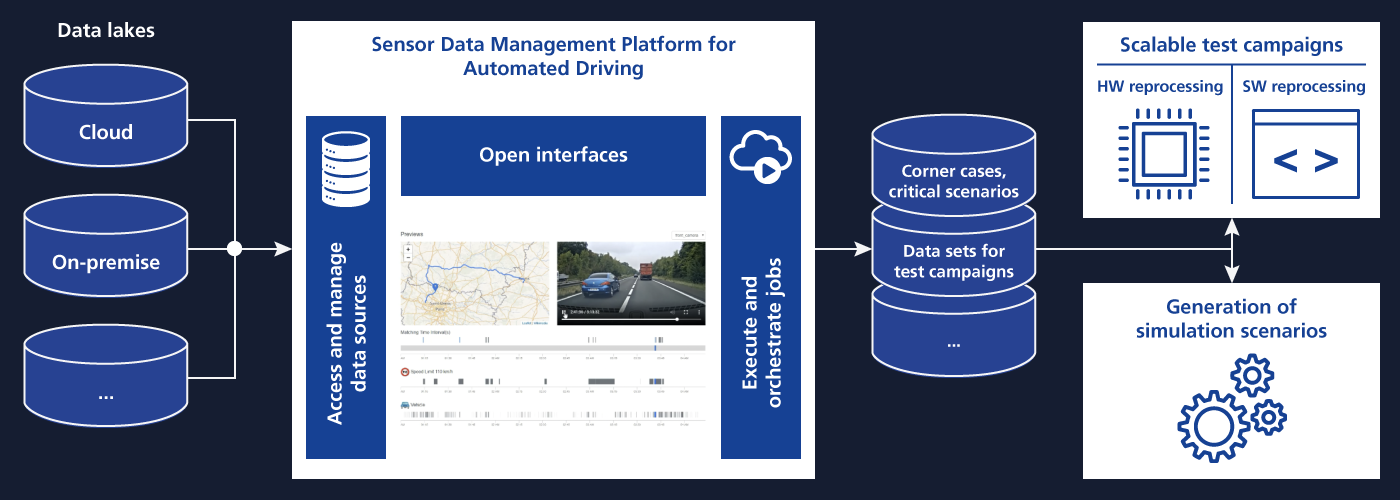
With RTMaps, data is acquired asynchronously and each data sample is captured along with its time stamp at its own genuine pace. This ensures that all data is time-correlated. The unparalleled performance of RTMaps on multicore CPUs enables users to get the most out of their computing architectures and easily set up applications that handle multiple, high-bandwidth data streams, including real-time processing and data fusion (sensor fusion). Sensor data can be recorded and played back synchronously for offline development and testing under reproducible conditions and faster than in real time.
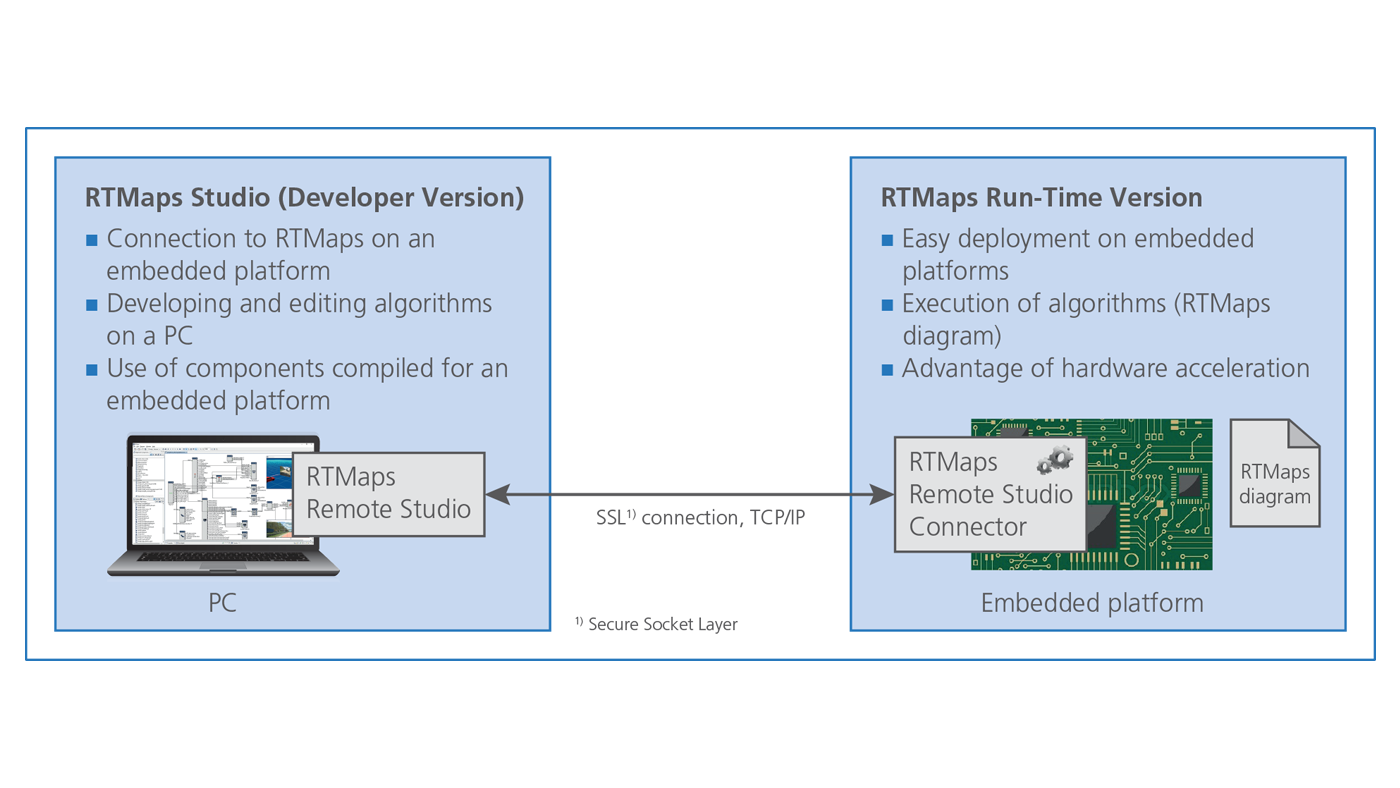
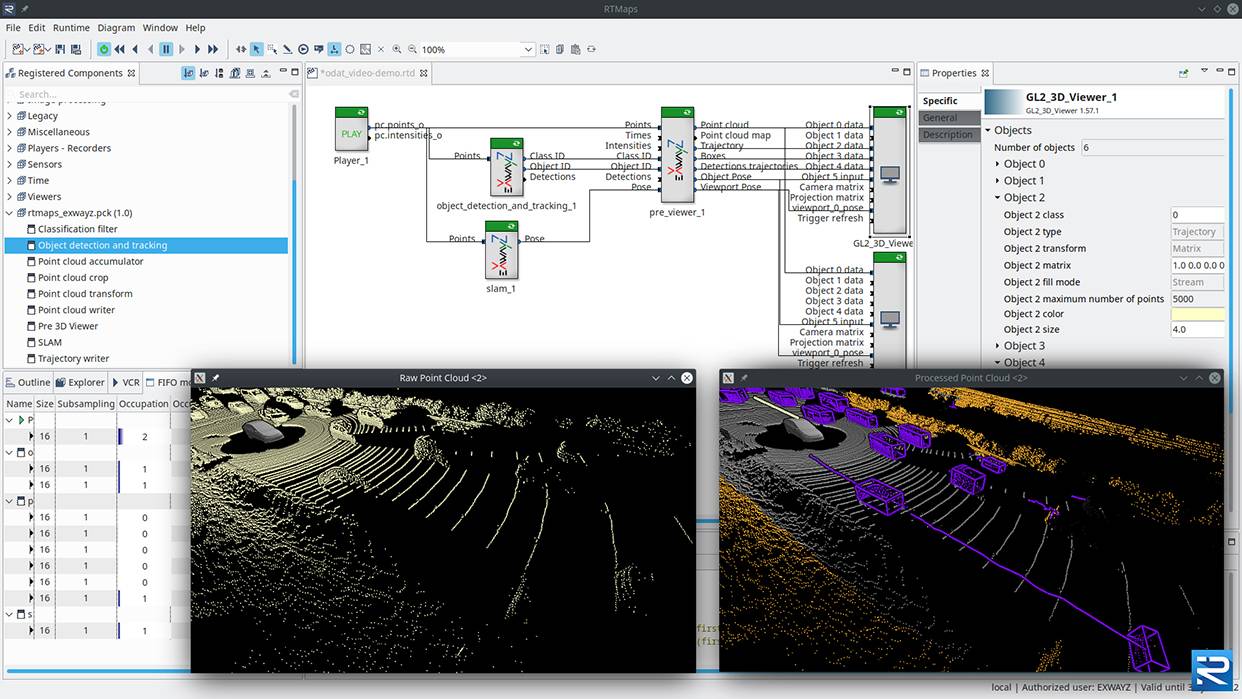
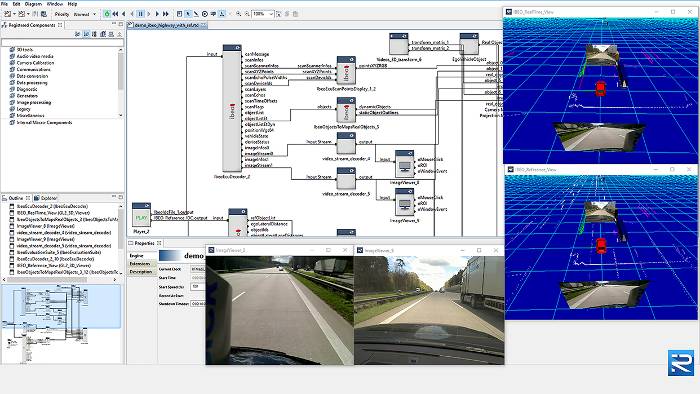
RTMaps provides comprehensive component libraries for automotive sensors, buses, and perception algorithms. It also supports any type and number of sensors and actuators (see complete list of supported technologies). Algorithms can be developed easily by means of block diagrams or by integrating own code using dedicated software development kits for C++ and Python. It is even possible to process data on multiple distributed platforms while preserving time coherency and synchronization of heterogeneous data streams.

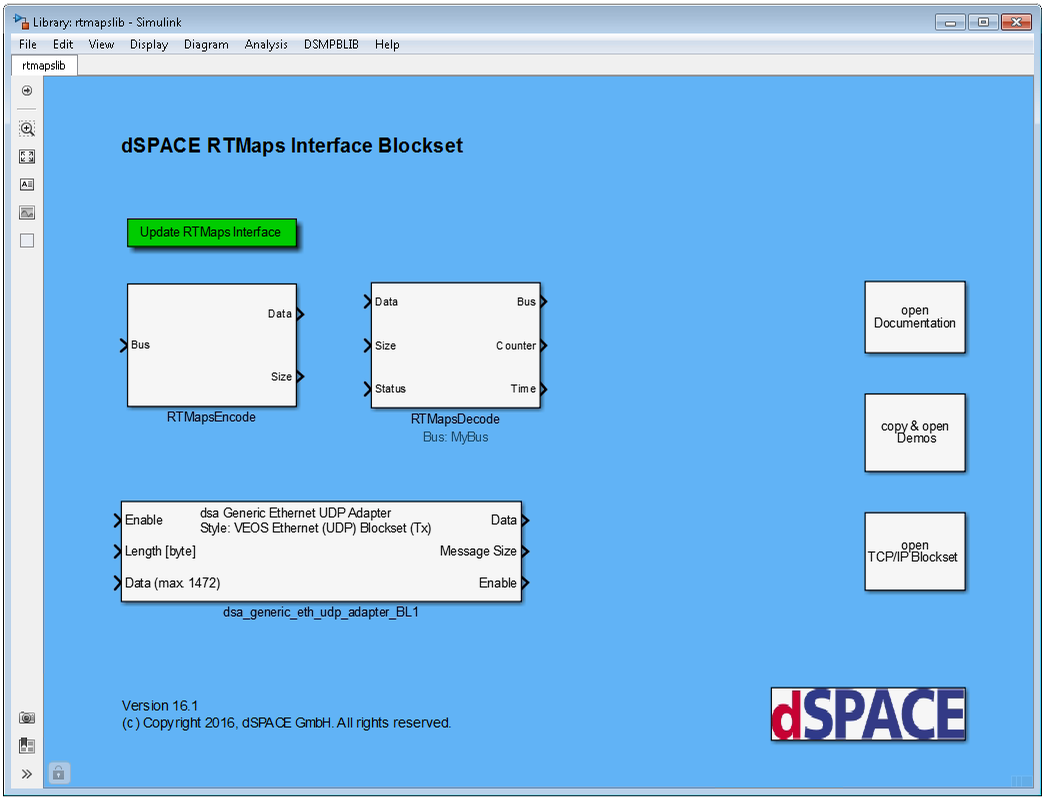
Integration into the dSPACE Tool Chain
RTMaps is tightly integrated into the dSPACE tool chain. For this, dSPACE provides an interface blockset designed specifically for dSPACE VEOS. RTMaps is the configuration and run-time environment for dSPACE AUTERA Data Logger and dSPACE Data Replay, and dSPACE TargetLink can be used to integrate production code generated from Simulink. Additionally, dSPACE ControlDesk can be connected to RTMaps to monitor and parameterize components that are implemented and processed in RTMaps.

Functionality Overview
Functionality Overview
| Functionality | Description |
|---|---|
| General |
|
| Supported sensors, communication buses, and protocols |
|
| Supported algorithms for developing functions for autonomus driving |
|
| Supported operating systems and platforms |
|
| Targeted applications |
|
Optional Products



What our customers say
Using RTMaps middleware and SBG Systems, we are able to efficiently design reliable, optimized localization and navigation algorithms for the redundant, real-time systems that drive our autonomous trucks, flatbeds, and shuttles.

RTMaps is a tool that can easily and effectively synchronize data from many sensors for ADAS, such as lidar, cameras, ADASIS v3.0 map, GNSS, etc. This is crucial for us because we are developing the complex navigation solution for autonomous driving systems.

For us, RTMaps is the right software for capturing, accurately time-stamping, synchronizing, processing, and forwarding the measurement values from our sensors.

With RTMaps, we control extensive, complex sensor data and can use it in a targeted and synchronized way to efficiently develop and validate our algorithms.

Using RTMaps improves the efficiency of algorithm development by more than 50%. This shortens the time to market.

The graphical development environment based on block diagrams makes it easy to recognize the entirety and details of the main program and subprograms, reducing software errors and allowing system design, verification, and utilization in a short time. Signal monitoring is relatively simple, even when the number of sensors and their connection points is large.