Bus Manager
Konfigurationswerkzeug für LIN-, CAN- und CAN-FD-Bussimulation
Der dSPACE Bus Manager ist ein leistungsstarkes Werkzeug für die Konfiguration der Buskommunikation zu Simulationszwecken, zum Beispiel für die Restbussimulation, und für die Implementierung der Buskommunikation in Echtzeitanwendungen für dSPACE SCALEXIO-Systeme. Unterstützt werden verschiedene Bussysteme wie LIN, CAN und CAN FD.
- Dasselbe Konfigurationswerkzeug für unterschiedliche Bussysteme
- Mehrere Kommunikationsmatrizen für eine Konfiguration
- Anpassbare Restbuskonfiguration mit Schnittstelle für die Werkzeugautomatisierung

Anwendungsbereiche
Der dSPACE Bus Manager ist ein leistungsstarkes Werkzeug für die Konfiguration der Buskommunikation zu Simulationszwecken, zum Beispiel für die Restbussimulation, und für die Implementierung der Buskommunikation in Echtzeitanwendungen. Es kann mit dSPACE SCALEXIO für Hardware-in-the-Loop (HIL)- und Rapid-Control-Prototyping (RCP)-Anwendungen und der PC-basierten Simulationsplattform dSPACE VEOS in Projekten zur virtuellen Validierung eingesetzt werden. Der Bus Manager unterstützt verschiedene Bussysteme wie LIN, CAN und CAN FD. Der Bus Manager ist ein Add-on für dSPACE ConfigurationDesk und deckt alle Anwendungsfälle ab. Wenn Sie nur VEOS einsetzen, können Sie den Bus Manager (stand-alone) verwenden.
Vorteile
- Ein Werkzeug, um mehrere Bussysteme gleichzeitig homogen zu konfigurieren
- Leichte Buskonfiguration per Drag & Drop
- Mehrere Kommunikationsmatrizen für eine Konfiguration
- Modellschnittstelle unabhängig vom Modellierungswerkzeug
- Schnittstelle für Werkzeugautomatisierung
- Konsistente Bussimulation für CAN und LIN
- Nahtlose Integration in ConfigurationDesk mit gleichem Look and Feel für alle Aufgaben, zum Beispiel Buskonfiguration oder I/O-Konfiguration
| Functionality | Description |
|---|---|
| General |
|
| LIN |
|
| CAN / CAN FD |
|
| Bus Manipulation and Inspection |
|
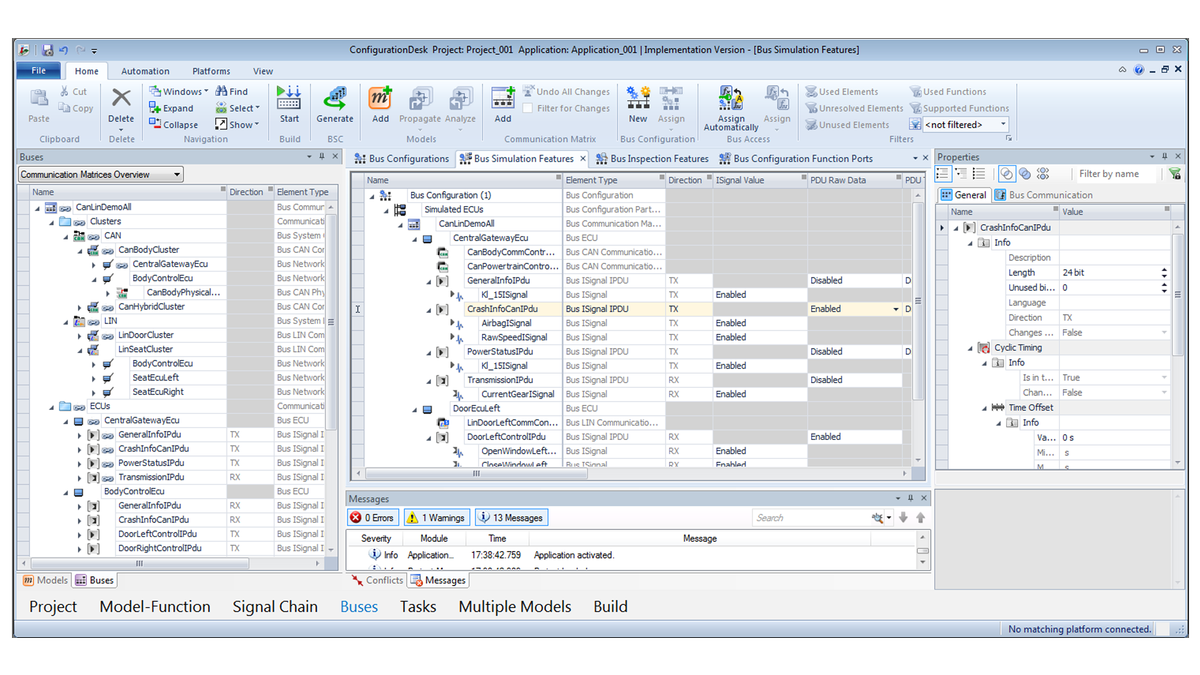
Der Bus Manager bietet einen komfortablen und direkten Prozess zur Implementierung von Bussimulationen. Generell kommt für virtuelle Szenarien mit VEOS und für die Echtzeitsysteme mit SCALEXIO derselbe Arbeitsablauf zum Einsatz:
- Import einer oder mehrerer Buskommunikationsmatrizen. Alle relevanten Informationen werden automatisch für die nachfolgende Buskonfiguration extrahiert.
- Erstellen einer Buskonfiguration
- Definieren und Konfigurieren der zu simulierenden Teile
- Konfigurieren von Manipulationen und Inspektionen bei Bedarf
- Spezifizieren des Zugriffs auf die Echtzeit-Hardware (nur bei RCP- und HIL-Szenarien)
- Falls notwendig, lassen sich unterschiedliche Parameter und Eigenschaften der simulierten Elemente konfigurieren. Zum Beispiel können Sie mit Experimentiersoftware wie ControlDesk den Zugriff auf Signalwerte zur Laufzeit aktivieren. Wenn die Simulation Signale erfordert, deren Werte dynamisch zur Laufzeit geändert werden müssen, können Sie Verhaltensmodelle einsetzen, zum Beispiel von MATLAB®/Simulink® oder Functional Mock-up Units (FMUs), um Verhaltensmodelle zu verwenden, die mit einem anderen Modellierungswerkzeug entworfen wurden.
- Und schließlich Starten des Build-Prozesses sowie Herunterladen (nur bei RCP- und HIL-Szenarien) und Ausführen der
Echtzeitanwendung.
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.