Bus Manager
Outil de configuration pour la simulation de bus LIN, CAN et CAN FD
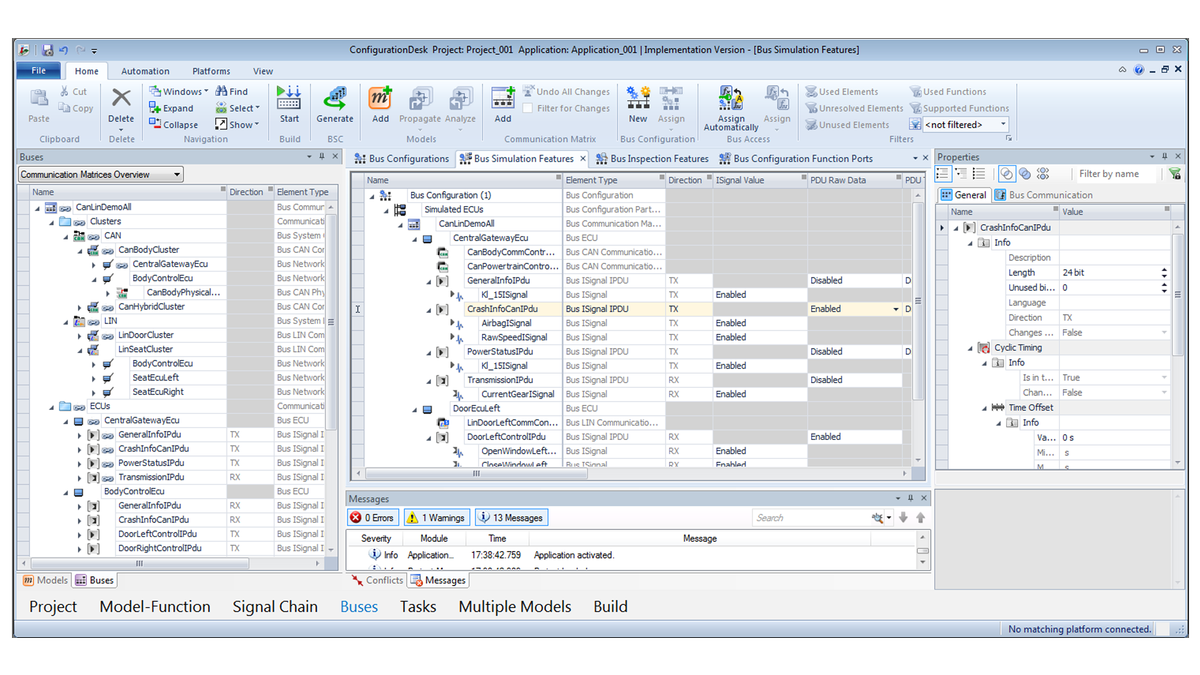
Le logiciel Bus Manager de dSPACE est l’outil puissant destiné à la configuration de la communication par bus pour les besoins de la simulation, p. ex. de la simulation du restbus, et de l’implémentation de la communication par bus dans les applications temps réel pour les systèmes SCALEXIO de dSPACE. Il supporte différents systèmes de bus tels que LIN, CAN et CAN FD.
- Un seul outil de configuration pour différents systèmes de bus
- La possibilité de travailler avec plusieurs matrices de communication pour une seule configuration
- Une configuration du restbus personnalisable avec une interface d’automatisation de l’outil

Domaines d’application
Le logiciel Bus Manager de dSPACE est un outil puissant destiné à la configuration de la communication par bus pour les besoins de la simulation, p. ex. de la simulation du restbus, et de l’implémentation de la communication par bus dans les applications temps réel. Il peut être utilisé avec SCALEXIO pour les applications Hardware-In-the-Loop (HIL) et de prototypage rapide de lois de commande ou avec VEOS, la plate-forme de simulation basée sur PC, dans les projets de validation virtuelle. L’outil Bus Manager supporte différents systèmes de bus tels que le LIN, CAN et CAN FD. L’outil Bus Manager est un complément à ConfigurationDesk et couvre tous les cas d’utilisation. Si vous n’utilisez que VEOS, vous pouvez utiliser l’outil Bus Manager (en version autonome).
Avantages clés
- Un seul outil permettant de configurer de façon homogène plusieurs systèmes de bus en même temps
- Une configuration des bus aisée par glisser-déposer
- La possibilité de travailler avec plusieurs matrices de communication pour une seule configuration
- Une interface de modèle indépendante de l’outil de modélisation
- Une interface d’automatisation de l’outil
- Une simulation cohérente des bus CAN et LIN
- Une intégration directe dans ConfigurationDesk offrant le même aspect et la même convivialité pour toutes les tâches, p. ex. pour la configuration de bus ou d’E/S
| Functionality | Description |
|---|---|
| General |
|
| LIN |
|
| CAN / CAN FD |
|
| Bus Manipulation and Inspection |
|
L’outil Bus Manager offre un workflow confortable et explicite pour implémenter les simulations de bus. En général, le même workflow s’applique aux scénarios virtuels avec VEOS aussi bien qu’aux systèmes temps réel avec SCALEXIO :
- Import d’une ou de plusieurs matrices de communication. Toutes les informations significatives sont extraites automatiquement pour la prochaine configuration du bus.
- Création d’une configuration de bus
- Définition et configuration des parties à simuler
- Configuration de la manipulation et de la vérification si nécessaire
- Spécification de l’accès au matériel temps réel (cette étape s’applique uniquement aux scénarios RCP et HIL).
- Si nécessaire, vous pouvez configurer différents paramètres et propriétés des éléments simulés. Par exemple, vous pouvez activer l’accès aux valeurs des signaux, en cours d’exécution, au moyen d’un logiciel d’expérimentation tel que ControlDesk. Si la simulation exige des signaux dont les valeurs doivent varier de façon dynamique en cours d’exploitation, vous pouvez utiliser des modèles de comportement, p. ex. des modèles de comportement MATLAB®/Simulink® ou des Functional Mock-up Units (FMUs) afin d’utiliser des modèles de comportement conçus dans un autre outil de modélisation.
- Pour finir, démarrage du processus de compilation et téléchargement (s’applique aux scénarios HIL et RCP) et exécution en temps réel.
application.
- Ventes Notre équipe d’ingénieurs d’affaires vous assistera dans le choix de votre système dSPACE. Ils vous fourniront également les tarifs et toutes les informations souhaitées concernant d’autres produits dSPACE.
- Achat de logiciels dSPACE Informations sur le téléchargement, l’installation et le système de licence des logiciels dSPACE
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.