Bus Manager
LIN、CAN、およびCAN FDバスシミュレーション用の設定ツール
dSPACE Bus Managerは、レストバスシミュレーションなどのシミュレーション用にバス通信を設定したり、dSPACE SCALEXIOシステム向けのリアルタイムアプリケーションでバス通信を実装したりするための強力なツールです。LIN、CAN、CAN FDなどのさまざまなバスシステムをサポートしています。
- 1つの設定ツールでさまざまなバスシステムに対応
- 複数の通信マトリクスの作業を一度に設定
- ツール自動化インターフェースを備えたカスタマイズ可能なレストバス設定

適用分野
dSPACE Bus Managerは、レストバスシミュレーションなどのシミュレーション用にバス通信を設定したり、リアルタイムアプリケーションでバス通信を実装したりするための強力なツールです。このツールは、HIL(Hardware-in-the-Loop)およびラピッドコントロールプロトタイピング(RCP)の用途ではdSPACE SCALEXIOと組み合わせ、仮想検証プロジェクトではPCベースのシミュレーションプラットフォームであるdSPACE VEOSと組み合わせて使用することができます。Bus Managerは、LIN、CAN、CAN FDなどのさまざまなバスシステムをサポートしています。Bus Managerは、dSPACE ConfigurationDeskのアドオンであり、すべての使用事例をカバーしています。VEOSのみを使用する場合は、Bus Manager(スタンドアロン)を使用可能です。
主な利用効果
- 1つのツールで同時に複数のバスシステムを均一に設定
- ドラッグアンドドロップでの容易なバス設定
- 複数の通信マトリクスの作業を一度に設定
- モデリングツールに依存しないモデルインターフェース
- ツール自動化インターフェース
- 一貫したCANおよびLINバスシミュレーション
- ConfigurationDeskへのシームレスな統合により、バス設定やI/O設定などのすべてのタスクで同じ外観と操作性を実現
| Functionality | Description |
|---|---|
| General |
|
| LIN |
|
| CAN / CAN FD |
|
| Bus Manipulation and Inspection |
|
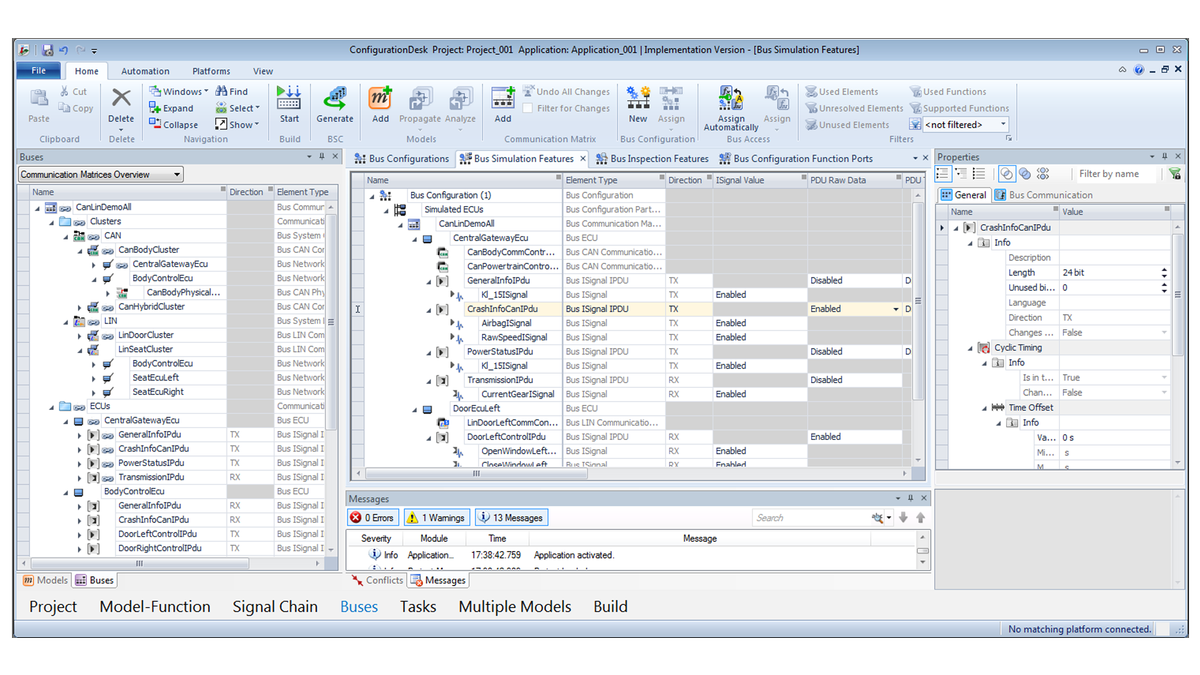
Bus Managerは、バスシミュレーション実装のための便利で簡単なワークフローを提供します。一般的に、VEOSを使用した仮想シナリオおよびSCALEXIOを使用したリアルタイムシステムには同一のワークフローが適用されます。
- 1つまたは複数のバス通信マトリクスをインポートします。すべての関連情報が自動的に抽出され、以降のバス設定に利用されます。
- バス設定を作成します。
- シミュレートする部品を定義および設定します。
- 必要に応じて操作や検査を設定します。
- リアルタイムでのハードウェアアクセスを指定します(このステップはRCPおよびHILシナリオにのみ適用)。
- 必要に応じて、シミュレートする要素のさまざまなパラメータやプロパティを設定できます。たとえば、ControlDeskなどの試験ソフトウェアを介して実行中の信号値へのアクセスを有効にすることができます。シミュレーション実行中に信号の値を動的に変化させなければならない場合は、MATLAB®/Simulink®ビヘイビアモデルや他のモデリングツールで設計されたビヘイビアモデルを使用するためのFunctional Mock-up Unit(FMU)などのビヘイビアモデルを使用することができます。
- 最後にビルドプロセスを開始し、リアルタイムアプリケーションをダウンロード(RCPおよびHILシナリオに適用)および実行します
。
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き