Bus Manager
Configuration tool for LIN, CAN, and CAN FD bus simulation
The dSPACE Bus Manager is a powerful tool for configuring bus communication for simulation purposes, e.g., restbus simulation, and for implementing the bus communication in real-time applications for dSPACE SCALEXIO systems. It supports different bus systems, such as LIN, CAN, and CAN FD.
- One configuration tool for different bus systems
- Work with several communication matrices for one configuration
- Customizable restbus configuration with tool automation interface

Application Areas
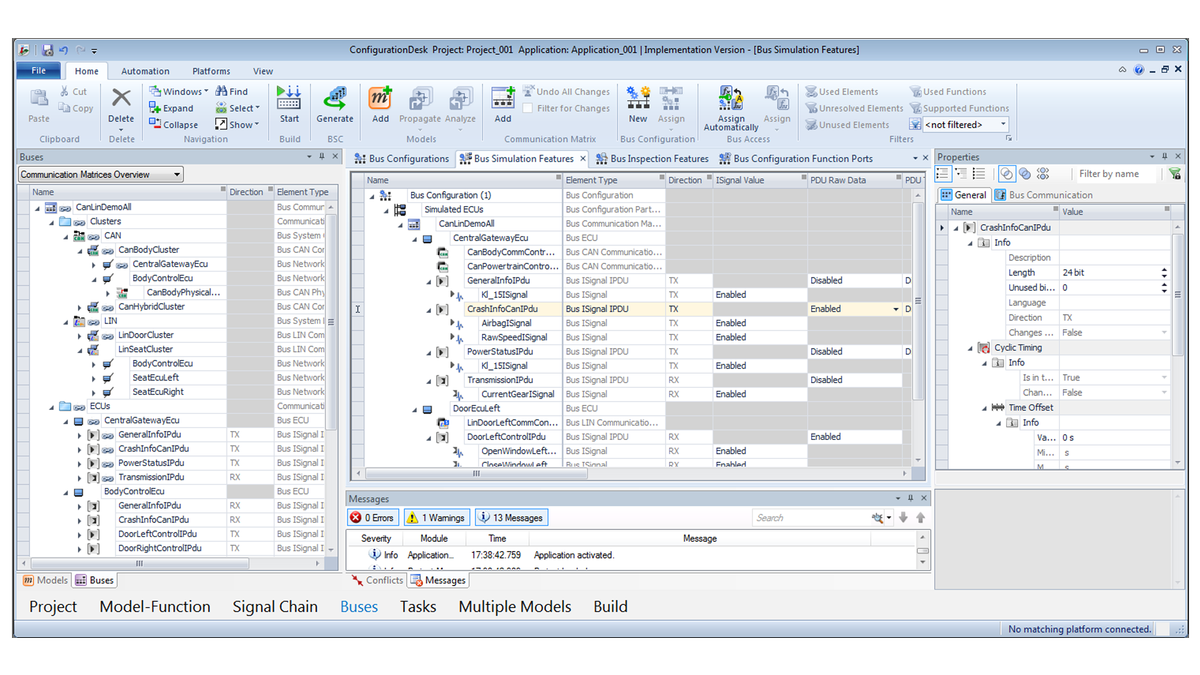
The dSPACE Bus Manager is a powerful tool for configuring bus communication for simulation purposes, e.g., restbus simulation, and rapid control prototyping. It can be used with dSPACE SCALEXIO and the MicroAutoBox III for realtime applications, or with the PC-based simulation platform dSPACE VEOS for virtual validation projects. The Bus Manager supports different bus systems, such as LIN, CAN, and CAN FD. The Bus Manager is an add-on for dSPACE ConfigurationDesk and covers all use cases. If you only use VEOS, you can use the Bus Manager (stand-alone).
Key Benefits
- One tool for homogeneously configuring several bus systems at the same time
- Easy bus configuration via drag & drop
- Work with several communication matrices for one configuration
- Modeling-tool-independent model interface
- Tool automation interface
- Consistent bus simulation for CAN and LIN
- Seamless integration into ConfigurationDesk resulting in the same look and feel for all tasks, e.g., bus configuration or I/O configuration
| Functionality | Description |
|---|---|
| General |
|
| LIN |
|
| CAN / CAN FD |
|
| Bus Manipulation and Inspection |
|
The Bus Manager offers a convenient and straight-forward workflow for implementing bus simulations. In general, the same workflow applies to virtual scenarios with VEOS and real-time systems with SCALEXIO and the MicroAutoBox III:
- Import one or more bus communication matrices. All relevant information is extracted automatically for the subsequent bus configuration.
- Create a bus configuration
- Define and configure the parts to be simulated
- Configure manipulation and inspection if required
- Specify the real-time hardware access (this step only applies to RCP and HIL scenarios).
- If required, you can configure different parameters and properties of the simulated elements. For example, you can enable the access to signal values during run time via experiment software such as ControlDesk. If the simulation requires signals whose values must change dynamically during run time, you can use behavior models, e.g., MATLAB®/Simulink® behavior models or Functional Mock-up Units (FMUs) to use behavior models designed in another modeling tool.
- Finally, start the build process, and download (applies to RCP and HIL scenarios) and execute the real-time
application.
혁신을 추진하세요. 항상 기술 개발의 동향을 주시해야 합니다.
저희 전문 지식 서비스에 가입하세요. dSPACE의 성공적인 프로젝트 사례를 확인해 보세요. 시뮬레이션 및 검증에 대한 최신 정보를 받아보세요. 지금 바로 dSPACE 다이렉트(뉴스레터)를 구독하세요.