Bus Manager
适用于 LIN、CAN 和 CAN FD 总线仿真的配置工具
dSPACE Bus Manager 是一款强大的工具,用于配置仿真的总线通信(例如残余总线仿真),以及在 dSPACE SCALEXIO系统的实时应用中实现总线通信。它支持不同的总线系统,例如 LIN、CAN 和 CAN FD。
- 面向不同总线系统的统一配置工具
- 同一个配置下使用多个通信矩阵
- 可通过工具自动化接口实现定制化的残余总线配置

应用领域
dSPACE Bus Manager 是一款强大的工具,用于配置仿真的总线通信(例如残余总线仿真),以及在实时应用中实现总线通信。它可以与dSPACE SCALEXIO一起用于硬件在环(HIL)和快速控制原型(RCP)应用,以及与基于PC的仿真平台dSPACE VEOS一起用于虚拟验证项目。Bus Manager支持不同的总线系统,例如 LIN、CAN 和 CAN FD。Bus Manager是dSPACE ConfigurationDesk的一个插件,覆盖所有的应用实例。如果只使用VEOS,则可以使用Bus Manager(单机版)。
主要优点
- 这款工具能对多个总线系统同时实施配置。
- 可通过拖放操作轻松完成总线配置
- 同一个配置下使用多个通信矩阵
- 不依赖建模工具的模型接口
- 工具自动化接口
- CAN 和 LIN 的总线仿真保持一致
- 无缝集成到ConfigurationDesk,所有任务均有相同的操作流程,例如总线配置或 I/O配置
| Functionality | Description |
|---|---|
| General |
|
| LIN |
|
| CAN / CAN FD |
|
| Bus Manipulation and Inspection |
|
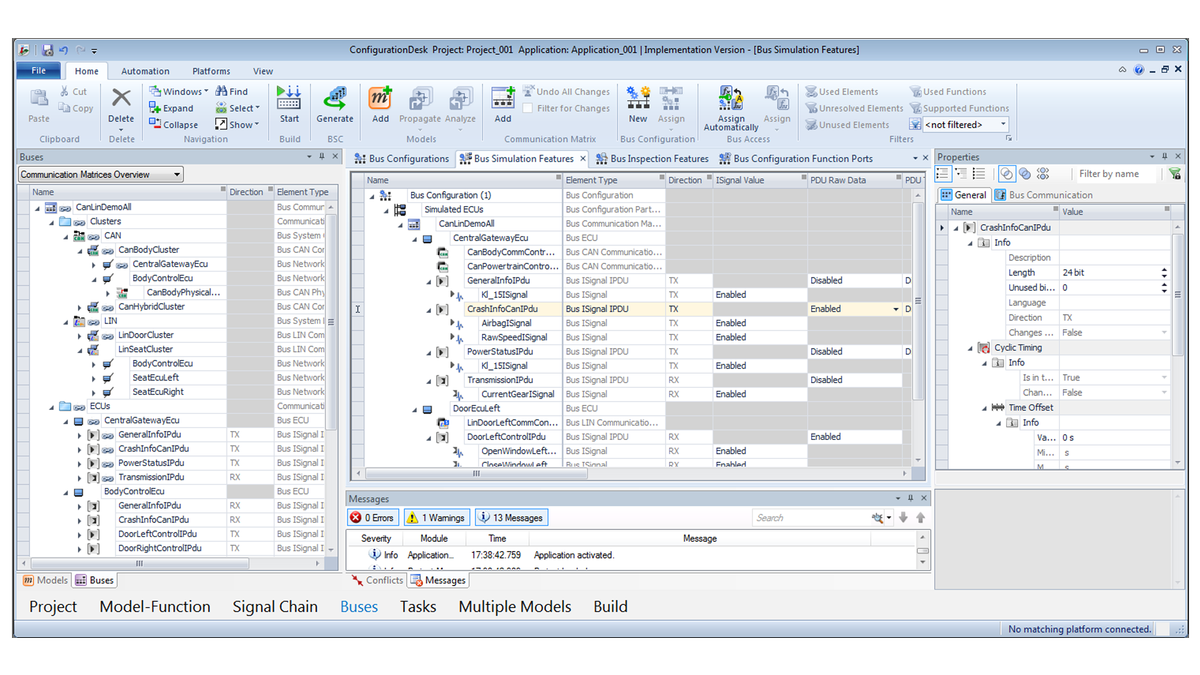
Bus Manager 提供一个用于实施总线仿真的简易工作流程。总的来说,同一工作流程适用于 VEOS的虚拟场景以及 SCALEXIO的实时系统:
- 导入一个或多个总线通信矩阵。可为后续总线配置自动提取所有相关信息。
- 创建总线配置
- 定义和配置待仿真的组件
- 如果需要,可对操作和检查进行配置
- 指定实时硬件访问(此步骤仅适用于RCP和 HIL场景)。
- 必要时可配置仿真组件的不同参数和属性。例如,在运行过程中通过试验软件(如 ControlDesk®)可以实现对信号值的访问。如果仿真要求信号值必须在运行过程中动态变化,则可以使用行为模型,例如 MATLAB®/Simulink® 行为模型,或其它建模工具中设计的 Functional Mock-up Units (FMUs) 行为模型。
- 最后启动搭建流程,并且下载(仅适用于RCP和 HIL场景)和执行实时
应用程序
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。