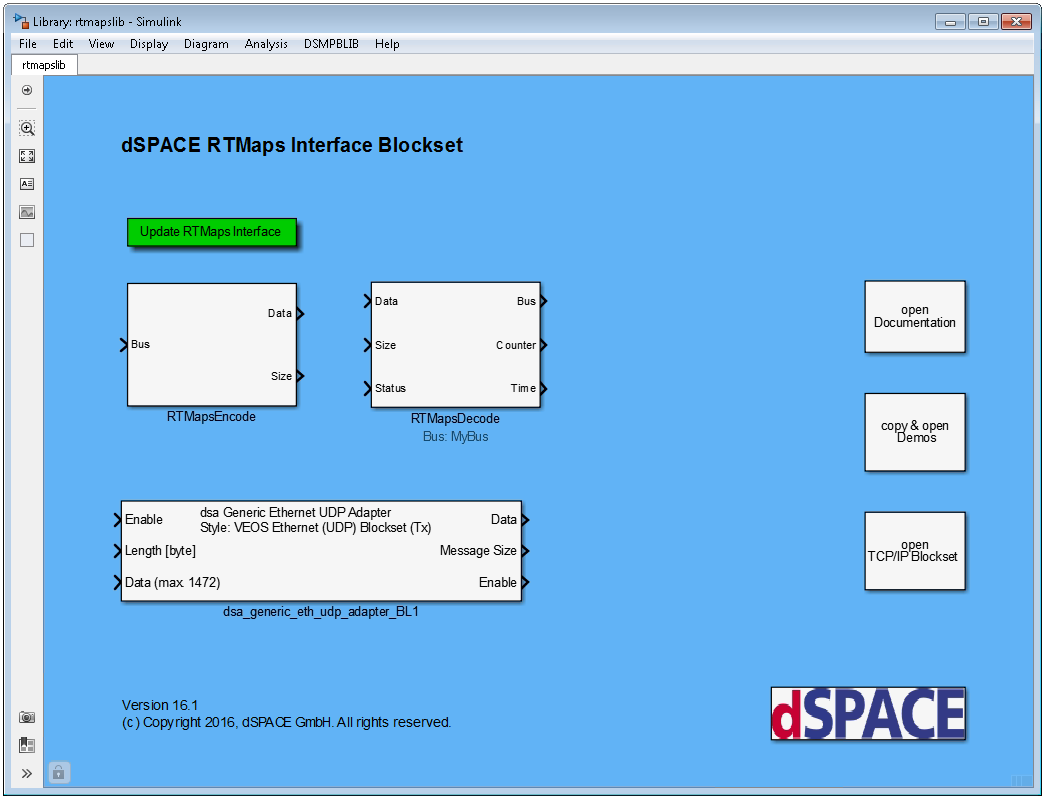
RTMaps Interface Blockset
マルチセンサアプリケーションやリアルタイムベースのハードウェアコントローラに対してフルスタックのプロタイピングを実現
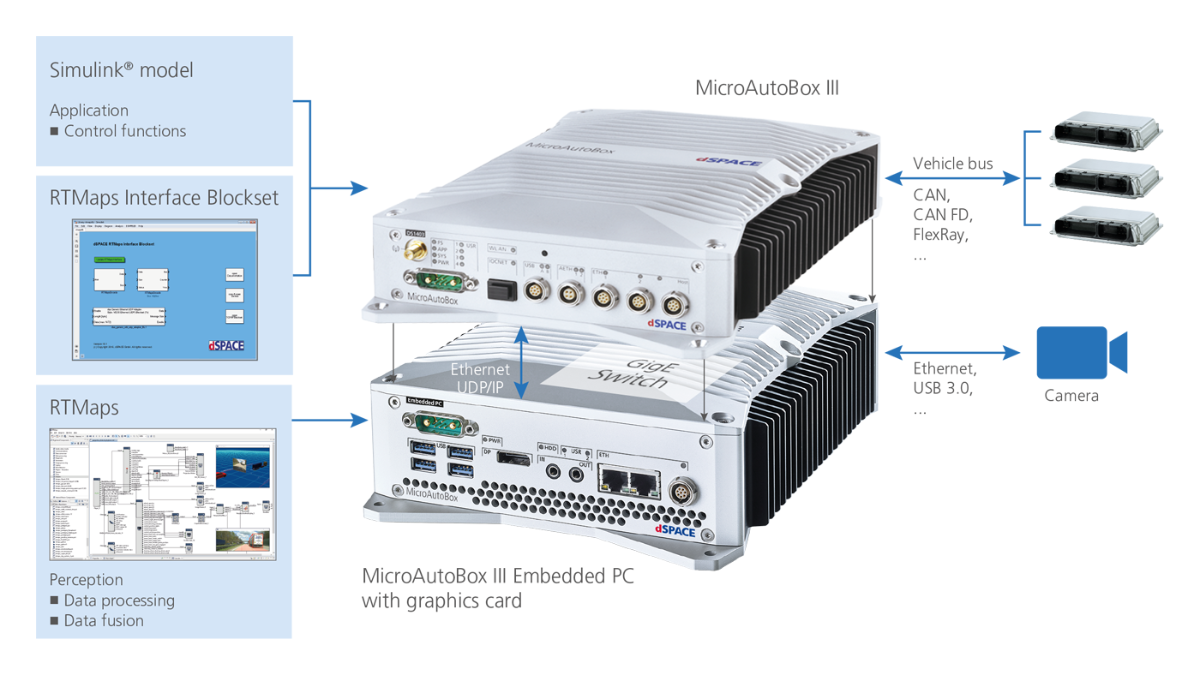
dSPACE RTMaps Interface Blockset for Simulink®を使用すると、dSPACEリアルタイムシステムまたはPCベースのシミュレーションプラットフォームdSPACE VEOSとIntempora社のRTMapsをUDP/IP経由で接続し、双方向かつ低レイテンシな通信を実現することができます。
- dSPACEプラットフォームとRTMapsとの間で低レイテンシな通信とクロック同期を行うためのSimulinkブロックセット
- 時間同期されたデータの記録および再生
- ADASおよび自動運転用のアプリケーションの容易な開発
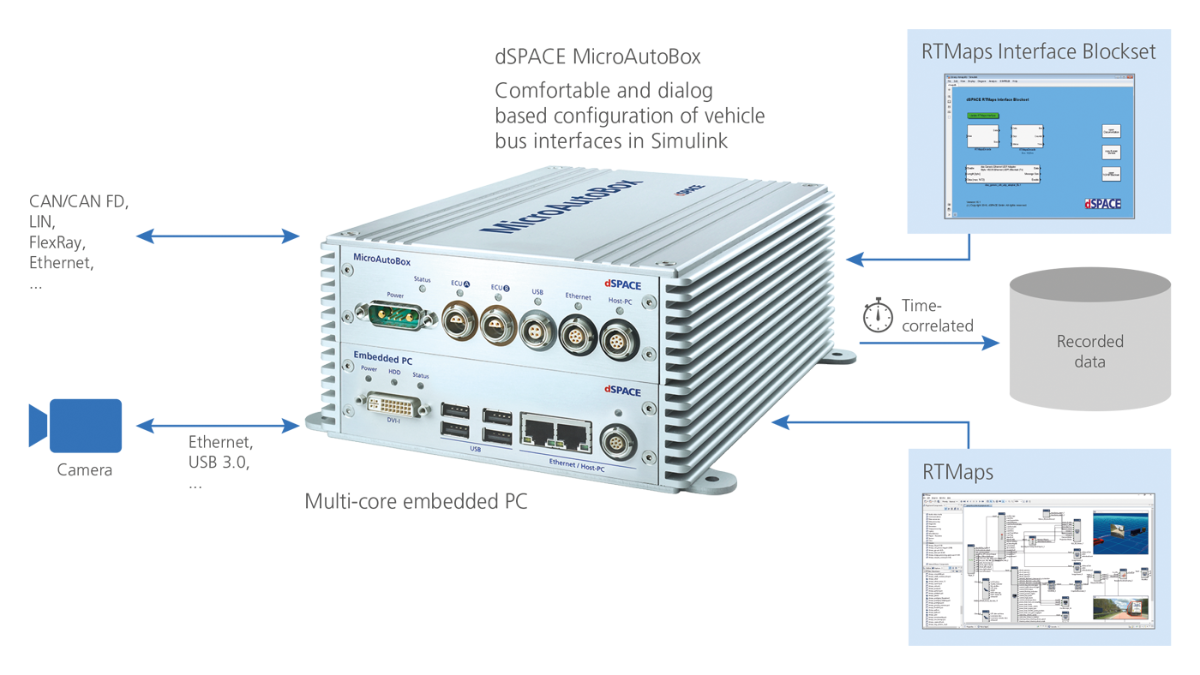
Recording and time correlation of camera and vehicle bus data.
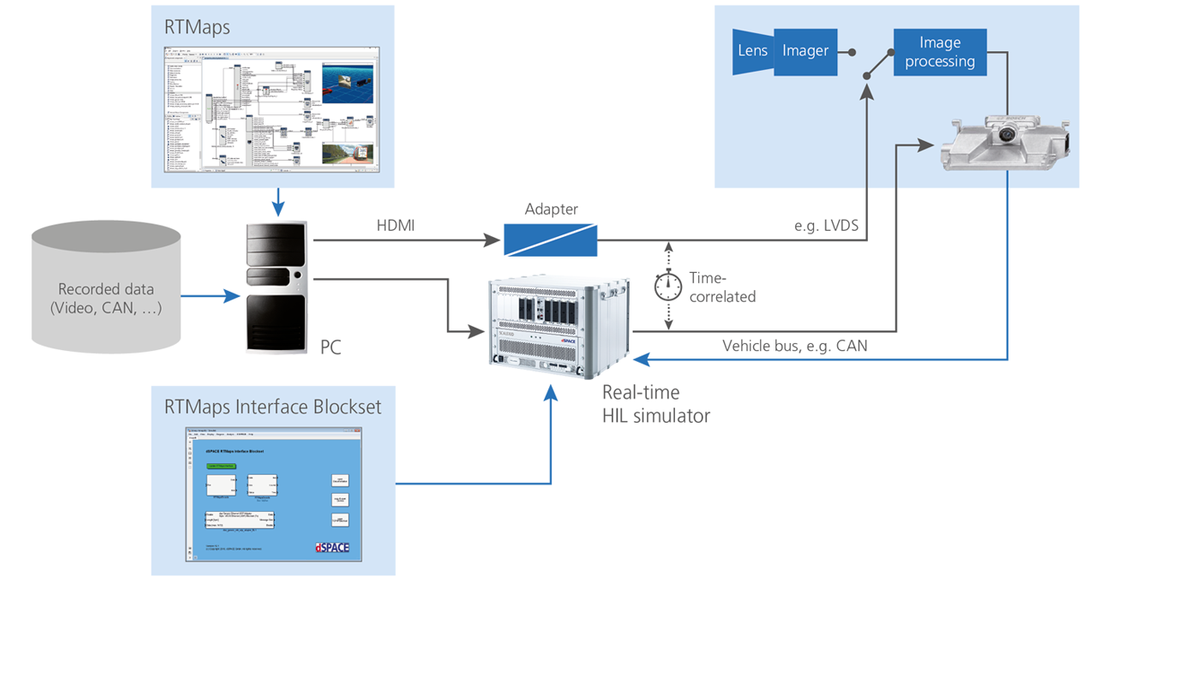
Open-loop HIL tests of electronic control units for image processing.



適用分野
先進運転支援システムや自動運転(ADAS/AD)の分野では、リアルタイムコントローラベースのハードウェアプロトタイピングでは不十分となっており、従来の車載ソフトウェアスタックは限界に達しています。その結果、認識やデータフュージョンへの特化型と、リアルタイムでのハードウェア実行への特化型という2つのプロトタイピング分野が派生してきています。
通常、データ処理や融合アルゴリズムはC++などの高級プログラミング言語を使用して実装される一方、アプリケーション機能の開発は、MATLAB®/Simulink®やdSPACEリアルタイムシステムを使用したモデルベースの設計で行われます。Intempora社のRTMapsは、卓越した性能を備えた実績のあるツールであり、ブロック線図を使用してC++ベースのマルチセンサアプリケーションをプロトタイピングすることができます。また、データの正確なタイムスタンプ、記録、および再生を行う機能も備えています。
dSPACE RTMaps Interface Blocksetは、dSPACEリアルタイムシステムまたはVEOSなどのdSPACEプラットフォームとRTMapsをUDP/IP経由で接続します。dSPACE RTMaps Interface Blocksetを使用するには、
主な利用効果
dSPACE RTMaps Interface Blocksetを使用すると、dSPACEリアルタイムシステムまたはPCベースのシミュレーションプラットフォームdSPACE VEOSとIntempora社のRTMapsをUDP/IP経由で接続し、双方向かつ低レイテンシな通信を実現することができます。開発者はわずかな手順だけで、Simulinkで使用しているアプリケーションを信号バスを介して適切な通信ブロックに接続し、RTMapsのマルチセンサアプリケーションへのデータ接続を確立することができます。送受信するデータに必要な記述は、簡単なボタン操作だけでSimulinkの対応する信号バスからXMLファイルとして生成されます。さらに、RTMaps内のクロックをさまざまなdSPACEプラットフォーム上のシミュレーション時間またはリアルタイムクロックと同期することができます。これにより、たとえば、dSPACE MicroAutoBoxの車両バスデータおよびRTMapsのカメラデータを取得および記録して正確に時間同期させることが可能です。もう1つの使用事例として、画像処理用ECUのオープンループ(データリプレイ)テストがあります。この場合、PC上のRTMapsは動画やバスデータを時間と同期した形で再生しながら、HIL(Hardware-in-the-Loop)システムにバス信号を送信することができます。これにより、ジッタのないレストバスシミュレーションが実現します。
RTMaps Interface Blocksetにより、RTMapsとdSPACEプラットフォームを強力に接続し、ADASおよび自動運転のための認知およびアプリケーションアルゴリズムの開発やテストを容易に行うことができます。
| 機能 | 説明 |
|---|---|
| 概要 |
|
| Ethernet通信 |
|
-
- オンライン表示
- ダウンロード
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き