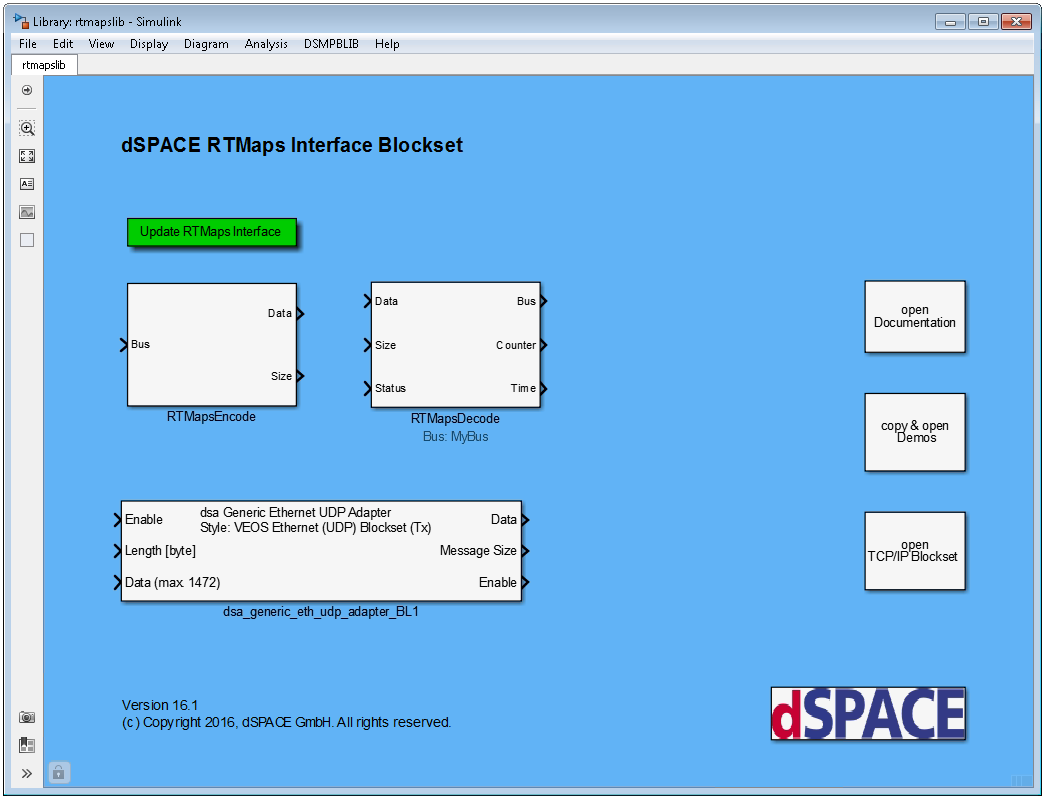
RTMaps Interface Blockset
Connecting dSPACE platforms to RTMaps
The dSPACE RTMaps Interface Blockset for Simulink® enables a bidirectional and low-latency UDP/IP communication between RTMaps from Intempora and dSPACE real-time systems or the PC-based simulation platform dSPACE VEOS®.
- Simulink blockset for low-latency communication and clock synchronization between dSPACE platforms and RTMaps
- Recording and playback of time-correlated data
- Easy development of applications for ADAS and automated driving
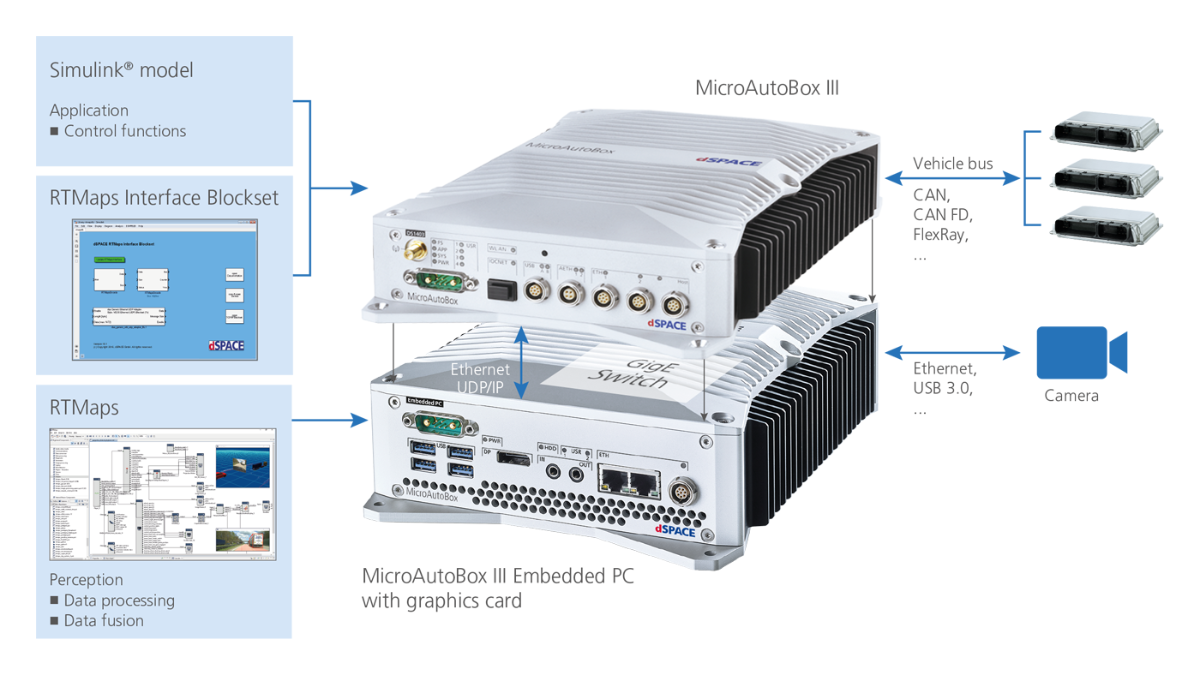
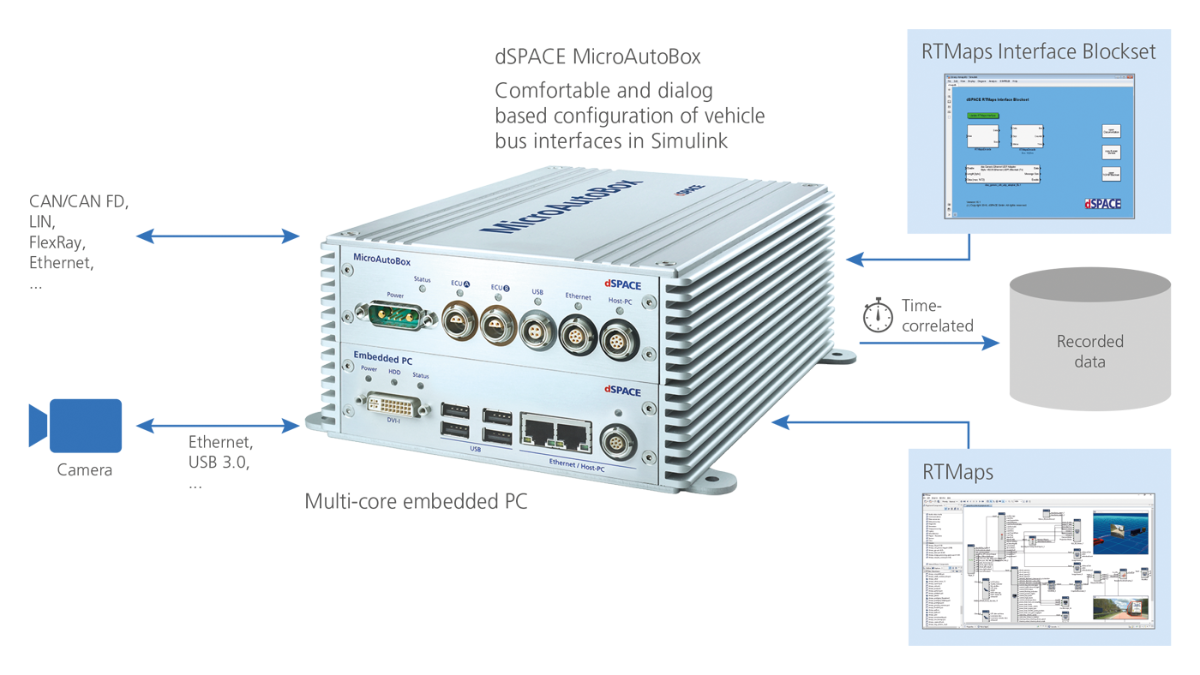
Recording and time correlation of camera and vehicle bus data.
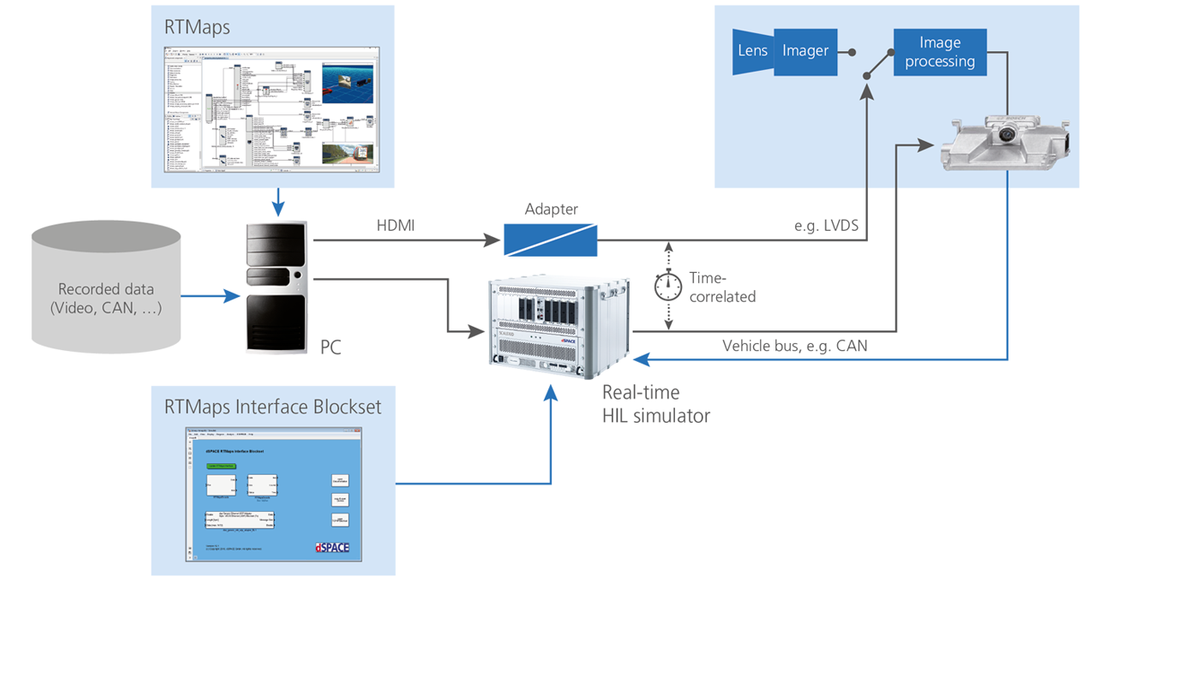
Open-loop HIL tests of electronic control units for image processing.



Application Areas
Advanced driver assistance systems (ADAS) and autonomous driving functions require comprehensive data from the vehicle’s environment, for example, from video and radar sensors. When the associated software functions are being prototyped, the data from the various sensors has to be processed and fused before the calculation results are fed into the actual application functions.
Typically, data processing and fusion algorithms are implemented in a high-level programming language such as C++, while the development of application functions rests on the model-based design approach using MATLAB®/Simulink® and dSPACE real-time systems. RTMaps from Intempora is an established tool with an unparalleled performance for prototyping C++-based multisensor applications by using block diagrams. In addition, RTMaps provides capabilities to precisely time-stamp, record and play back data.
The dSPACE RTMaps Interface Blockset connects dSPACE platforms, such as dSPACE real-time systems, or VEOS with RTMaps via UDP/IP.
Key Benefits
The dSPACE RTMaps Interface Blockset provides a bidirectional, low-latency communication via UDP/IP between RTMaps from Intempora and dSPACE real-time systems or the PC-based simulation platform dSPACE VEOS. In just a few steps, developers can connect their applications in Simulink to the appropriate communication blocks via signal buses and establish data connections to multisensor applications in RTMaps. The required description of the data to be transmitted or received is generated as an XML file from the corresponding signal buses in Simulink at the push of a button. In addition, the blockset allows the clock in RTMaps to be synchronized with the simulation time or the real-time clock on dSPACE platforms. This makes it possible, for example, to capture, record, and precisely time-correlate vehicle bus data on dSPACE MicroAutoBox and camera data in RTMaps. A further use case is the open-loop (stimulus) test of ECUs for image processing. In this use case, RTMaps on a PC serves to play back time-correlated video and bus data, while the bus signals are sent to a hardware-in-the-loop (HIL) system. This ensures a low-jitter restbus simulation.
The RTMaps Interface Blockset establishes a powerful connection between RTMaps and dSPACE platforms and facilitates the development and testing of perception and application algorithms for ADAS and automated driving.
| Functionality | Description |
|---|---|
| General |
|
| Ethernet communication |
|
-
- Afficher en ligne
- Téléchargement
- Ventes Notre équipe d’ingénieurs d’affaires vous assistera dans le choix de votre système dSPACE. Ils vous fourniront également les tarifs et toutes les informations souhaitées concernant d’autres produits dSPACE.
- Achat de logiciels dSPACE Informations sur le téléchargement, l’installation et le système de licence des logiciels dSPACE
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.