Radar Test Bench – Compact 3D
- レーダーセンサの無線スティミュレーション
- 最大20のレーダーオブジェクトに対して、信頼性の高いマルチターゲット角度シミュレーションをリアルタイムに実行可能
- 作用連鎖の完全なテスト
- 24、77、および79 GHzレーダーのサポート

レーダーセンサは、カメラと超音波センサに次いで自動車業界で最もよく使用される環境センサです。これらは、アダプティブクルーズコントロール(ACC)や自動緊急ブレーキ(AEB)などの多くの用途で使用されており、高度に自動化された自律運転において重要な役割を果たしています。現実的かつ再現可能なテストをラボで実行するには、さまざまな要素を考慮する必要があります。レーダーセンサをスティミュレートする場合、異なる距離、相対速度、および方位角に基づいて車や歩行者などの現実の対象物に対するレーダーエコーを生成する必要がある一方で、意図しないレーダー反射を回避するための十分な対策を実施する必要もあります。dSPACEでは、レーダーベースの車載機能を同期化されたクローズドループHILを使用して現実的にテストすることができる信頼性に優れたソリューションであるレーダーテストベンチを提供しています。また、このレーダーテストベンチでは、レーダーセンサやそのコンポーネントの検証テストを行ったり、アプリケーションごとに放射パターンを計測したりすることもできます。
主な利用効果
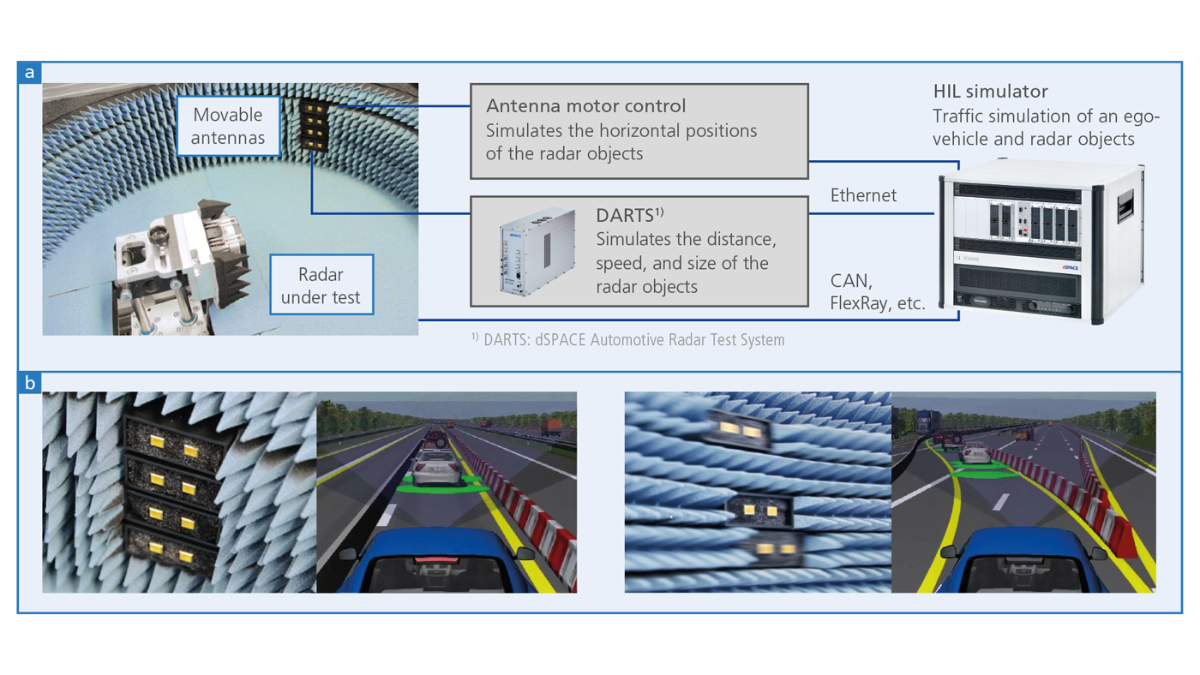
dSPACEレーダーテストベンチは、レーダーセンサのフロントエンドの無線スティミュレーションにより、作用連鎖全体をテストします。このテストベンチを使用すると、最大20のレーダーターゲットに対して、信頼性の高いマルチターゲット角度シミュレーションをリアルタイムに実行することができます。このテストベンチの基本的な構成は、送受信機能付き電波暗室、適合されたdSPACE Automotive Radar Test System(DARTS)、およびSCALEXIO HILシミュレータです。テストの際は、レーダーセンサは電波暗室に固定され、レーダーエコーによってスティミュレートされます。アンテナは同心円状に動作し、方位角の情報を返します。必要な場合、シミュレーションに車のフロントバンパーやシャシを含めることもできます。このようにして、レーダー前部での信号検出からレーダーECUでの評価まで、すべてのソフトウェアおよびハードウェアレイヤーを考慮に入れることができます。レーダーECUは、整合性のあるエコーに基づいてレーダーオブジェクトの距離と速度を適切に特定します。この基盤となるのは、Automotive Simulation Model(ASM)でシミュレートした運転シナリオです。レーダーECUは車載バス経由でHILシミュレータにも接続されるため、検出したレーダーオブジェクトのリストとシミュレーション環境をクローズドループ動作の中でやり取りすることができます。このレーダーテストベンチは、任意の変調方式の24、77、および79 GHzレーダーセンサに対応しています。レーダーテストベンチを個々の要件に合わせて調整し、他のレーダーテストベンチやその他のテストシステム(カメラ、超音波など)と同期して動作させることができます。
| Parameter | Specification |
|---|---|
| Radar objects |
|
| Update rate |
|
|
Distance range Increment |
|
|
Speed range Increment |
|
| Tilt angle range of device under test |
|
|
Azimuth angle range Accuracy |
|
| Azimuth angular speed |
|
| Supported radar frequencies |
|
| Bandwidth |
|
-
- オンライン表示
- ダウンロード
- Radar Test Bench – Advanced 6D The Radar Test Bench – Advanced 6D is designed especially for the validation and specification of next generation radar sensors (e.g., separability, field of view, resolution).
- Radar Test Bench – Essential 2D Radar Test Bench – Essential 2Dを使用すると、単一のターゲットに対して水平角および仰角のシミュレーションを実行することができます。2つの自由度を有するテストベンチは、コンポーネントのテストやシンプルなADASファンクションのテスト、およびECUの妥当性確認に最適です。
- EOL CATR Test System Precise end-of-line testing of radar sensors with high throughput and flexible test scenarios
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き