Radar Test Bench – Compact 3D
- Over-the-Air-Stimulation des Radarsensors
- Zuverlässige Multitarget-Winkelsimulation für bis zu 20 Radarobjekte in Echtzeit
- Test der gesamten Wirkkette
- Unterstützung für 24-, 77- und 79-GHz-Radargeräte

Neben Kameras und Ultraschallsensoren sind Radarsensoren die am häufigsten verwendeten Umgebungssensoren in der Automobilindustrie. Sie werden in vielen Anwendungen wie der Abstandsregelung (ACC) und der autonomen Notbremsung (AEB) eingesetzt und werden weiterhin eine wichtige Rolle beim hochautomatisierten und autonomen Fahren spielen. Um im Labor realistisch und reproduzierbar testen zu können, müssen verschiedene Faktoren berücksichtigt werden. Einerseits muss ein Radarsensor durch erzeugte Radarechos stimuliert werden, die realen Radarobjekten wie Fahrzeugen oder Fußgängern in unterschiedlichen Abständen, Relativgeschwindigkeiten und Azimutwinkeln entsprechen. Andererseits müssen unerwünschte Radarreflexionen durch geeignete Maßnahmen vermieden werden. Mit dem Radarprüfstand bietet dSPACE eine zuverlässige Lösung für das realitätsnahe Testen radarbasierter Fahrzeugfunktionen mit Hilfe eines synchronisierten Closed-Loop-HILs. Darüber hinaus ermöglicht der Radarprüfstand Verifikationstests des Radarsensors und seiner Komponenten sowie die anwendungsspezifische Messung des Antennendiagramms.
Vorteile
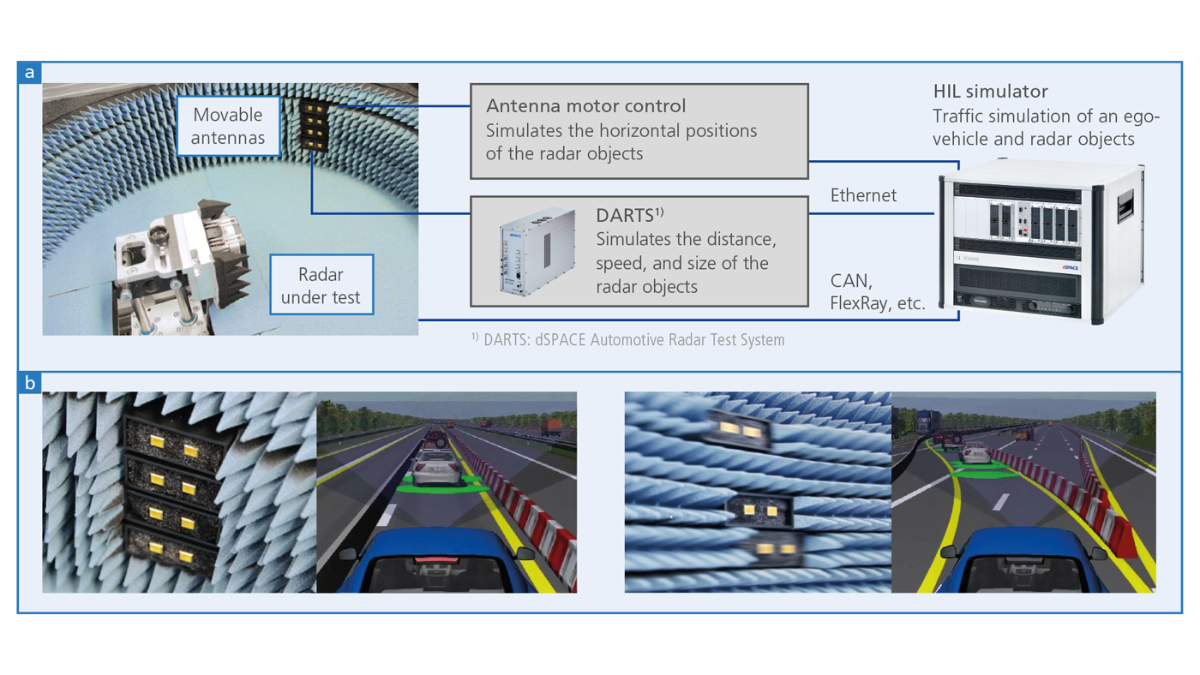
Um die gesamte Wirkkette zu testen, bieten die dSPACE Radarprüfstände eine Over-the-Air-Stimulation des Radarsensor-Front-ends. Der Prüfstand ermöglicht eine zuverlässige Multitarget-Winkelsimulation für bis zu 20 Radarziele in Echtzeit. Der Prüfstand besteht im Wesentlichen aus einer Absorberkammer mit Sende-/Empfangsfunktionalität, bis zu fünf kalibrierten dSPACE Automotive Radar Test Systemen (DARTS) und einem SCALEXIO HIL-Simulator. Für den Test wird der Radarsensor in der Kammer eingeschlossen und mit Radarechos stimuliert. Die konzentrische Bewegung der Antennen liefert Informationen über ihren Azimutwinkel. Bei Bedarf kann die Simulation auch die Frontschürze einschließen. Auf diese Weise können alle Software- und Hardware-Schichten berücksichtigt werden, von der Erfassung des Signals vorne am Radar bis hin zur Auswertung im Radarsteuergerät. Die kohärenten Echos ermöglichen es dem Radarsteuergerät, den Abstand und die Geschwindigkeit der Radarobjekte zuverlässig zu bestimmen. Grundlage dafür sind Fahrsituationen, die mit den Automotive Simulation Models (ASM) simuliert werden. Das Radarsteuergerät ist ebenfalls über einen Fahrzeugbus mit dem HIL-Simulator verbunden, um die Liste der erfassten Radarobjekte mit der Simulationsumgebung im Closed-Loop-Betrieb auszutauschen. Der Radarprüfstand unterstützt Radarsensoren mit 24, 77 und 79 GHz in allen Modulationsarten. Er kann an individuelle Anforderungen angepasst und synchron mit weiteren Radarprüfständen oder mit anderen Prüfsystemen (Kamera, Ultraschall etc.) betrieben werden.
| Parameter | Specification |
|---|---|
| Radar objects |
|
| Update rate |
|
|
Distance range Increment |
|
|
Speed range Increment |
|
| Tilt angle range of device under test |
|
|
Azimuth angle range Accuracy |
|
| Azimuth angular speed |
|
| Supported radar frequencies |
|
| Bandwidth |
|
-
- Online-Ansicht
- Download
- Radar Test Bench – Advanced 6D Der Radar Test Bench – Advanced 6D ist speziell für die Validierung und Spezifikation von Radarsensoren der nächsten Generation konzipiert, zum Beispiel für Konzepte wie Trennbarkeit, Sichtfeld und Auflösung.
- Radar Test Bench – Essential 2D The Radar Test Bench – Essential 2D makes it possible to perform azimuth and elevation simulation for a single target. With two degrees of freedom, the test bench is suitable for component tests, simple ADAS function tests, and ECU validation.
- EOL CATR Testsystem Präzise Bandendeprüfung von Radarsensoren mit hohem Durchsatz und flexiblen Prüfszenarien
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.