dSPACE Interface Blockset for ROS
Connecting dSPACE real-time systems to the Robot Operating System (ROS)
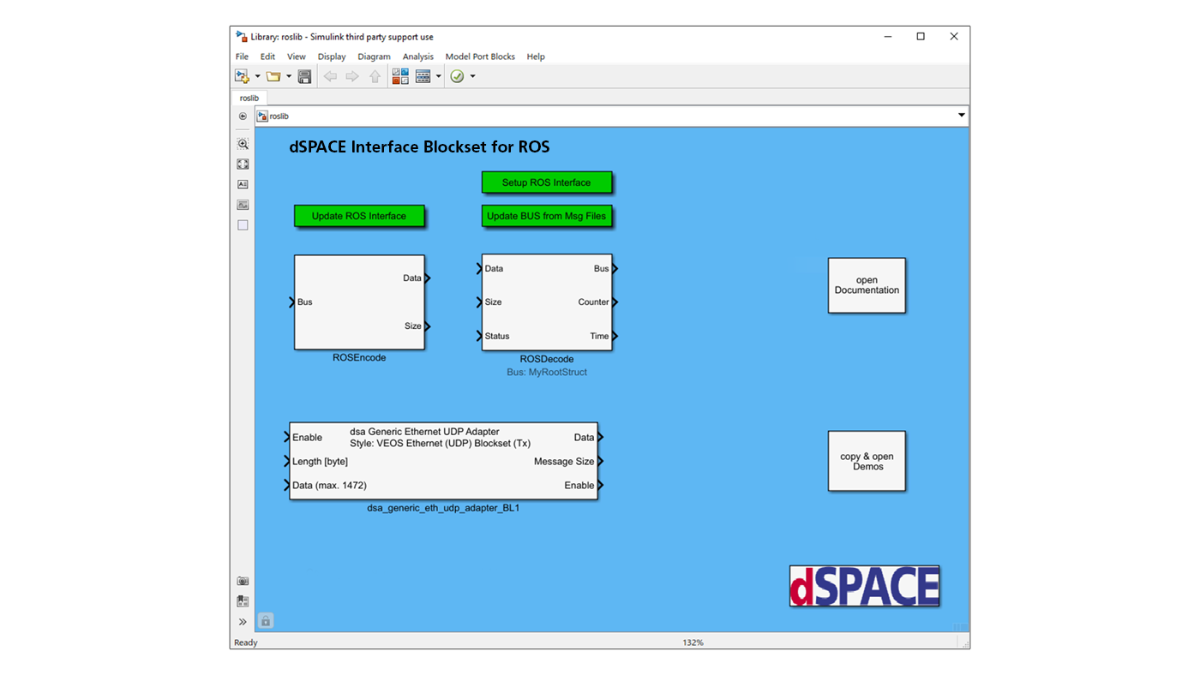
The dSPACE Interface Blockset for ROS provides an easy-to-use method to exchange data between dSPACE real-time systems and ROS.
- Simulink® blockset for easy communication between dSPACE platforms and ROS
- Support of both ROS 1 and ROS 2
- Creation of ROS messages from within Simulink
- Import of existing ROS message files

Application Areas
Functions for advanced driving assistance systems and autonomous driving (ADAS/AD) require multiple heterogeneous data streams such as cameras, radar, and lidar. The Robot Operating System (ROS) is an open source framework that is widely used for prototyping these ADAS/AD functions. Through the dSPACE Interface Blockset for ROS, the power of prototyping and testing offered by the dSPACE PC-based simulation platform VEOS and real-time hardware (MicroAutoBox and SCALEXIO) is combined with the ROS benefits for prototyping perception and sensor fusion algorithms.
Key Benefits
The dSPACE Interface Blockset for ROS provides an easy-to-use method to exchange data between dSPACE real-time systems and ROS. The blockset contains a collection of blocks to manage diverse tasks. It allows for setting up basic parameters, updating the ROS Interface and importing ROS messages, in addition to the core functionality of publishing ROS topics by encoding Simulink® buses to TCP (Transmission Control Protocol) or UDP1) (User Datagram Protocol) packages, and subscribing to ROS topics by decoding TCP/UDP1) packages into Simulink buses.
| Functionality | Description |
|---|---|
| General |
|
| Supported ROS versions |
|
| Limitations |
|
-
- View online
- Download
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.