ROS용 dSPACE 인터페이스 블록세트
dSPACE 실시간 시스템을 로봇 운영 체제(ROS)에 연결
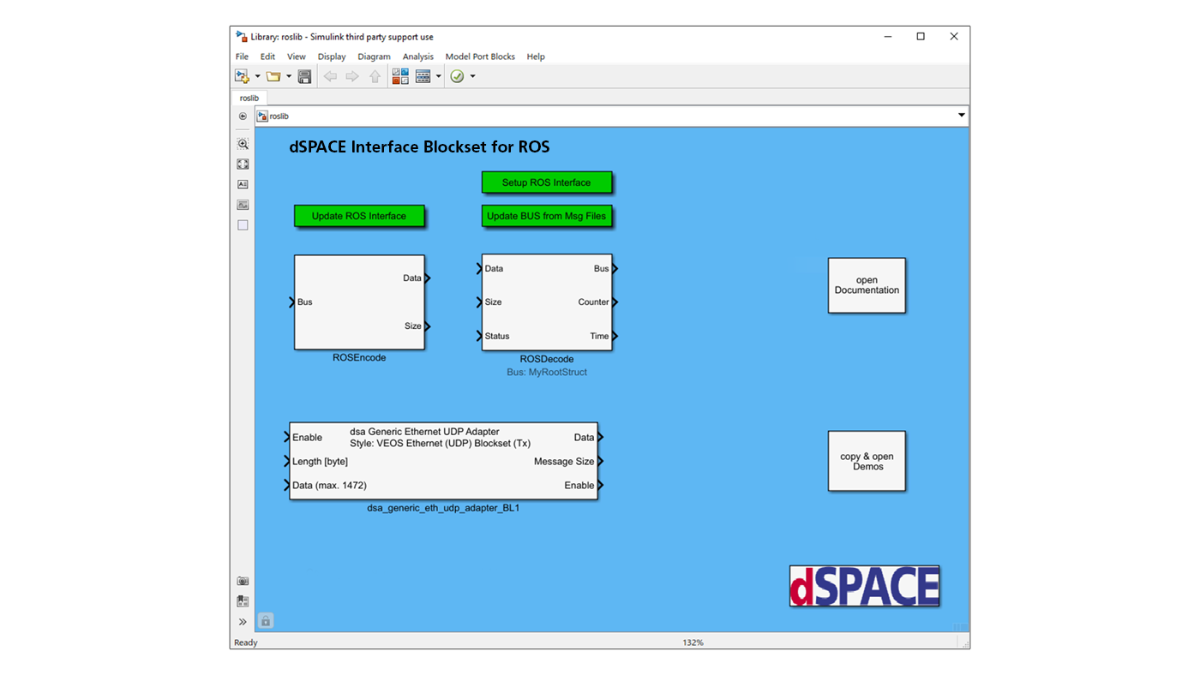
ROS용 dSPACE 인터페이스 블록세트는 dSPACE 실시간 시스템과 ROS 간에 데이터를 교환하는 사용하기 쉬운 방법을 제공합니다.
- dSPACE 플랫폼과 ROS 간의 손쉬운 통신을 위한 Simulink ® 블록세트
- ROS 1 및 ROS 2 모두 지원
- Simulink 내에서 ROS 메시지 생성
- 기존 ROS 메시지 파일 가져오기

적용 분야
첨단 운전 보조 시스템 및 자율 주행(ADAS/AD)을 위한 기능에는 카메라, 레이더, 라이더와 같은 여러 이기종 데이터 스트림이 필요합니다. 로봇 운영 시스템(ROS)은 이러한 ADAS/AD 기능의 프로토타이핑에 널리 사용되는 오픈 소스 프레임워크입니다. ROS용 dSPACE 인터페이스 블록세트를 통해 dSPACE PC 기반 시뮬레이션 플랫폼 VEOS와 실시간 하드웨어(MicroAutoBox 및 SCALEXIO)가 제공하는 프로토타이핑 및 테스트 기능이 프로토타이핑 인식 및 센서 융합 알고리즘에 대한 ROS의 이점과 결합됩니다.
주요 이점
ROS용 dSPACE 인터페이스 블록세트는 dSPACE 실시간 시스템과 ROS 간에 데이터를 교환하는 사용하기 쉬운 방법을 제공합니다. 블록세트에는 다양한 작업을 관리하기 위한 블록 모음이 포함되어 있습니다. Simulink ® 버스를 TCP(전송 제어 프로토콜) 또는 UDP 1) (사용자 데이터그램 프로토콜) 패키지로 인코딩하여 ROS 주제를 게시하는 핵심 기능 외에도 기본 매개변수 설정, ROS 인터페이스 업데이트 및 ROS 메시지 가져오기를 허용합니다. TCP/UDP 1) 패키지를 Simulink 버스로 디코딩하여 ROS 주제를 구독합니다.
| 기능 | 설명 |
|---|---|
| 일반 |
|
| 지원되는 ROS 버전 |
|
| 제한 사항 |
|
-
- View online
- Download
혁신을 추진하세요. 항상 기술 개발의 동향을 주시해야 합니다.
저희 전문 지식 서비스에 가입하세요. dSPACE의 성공적인 프로젝트 사례를 확인해 보세요. 시뮬레이션 및 검증에 대한 최신 정보를 받아보세요. 지금 바로 dSPACE 다이렉트(뉴스레터)를 구독하세요.