dSPACE Interface Blockset for ROS
将dSPACE实时系统连接到Robot Operating System (ROS)
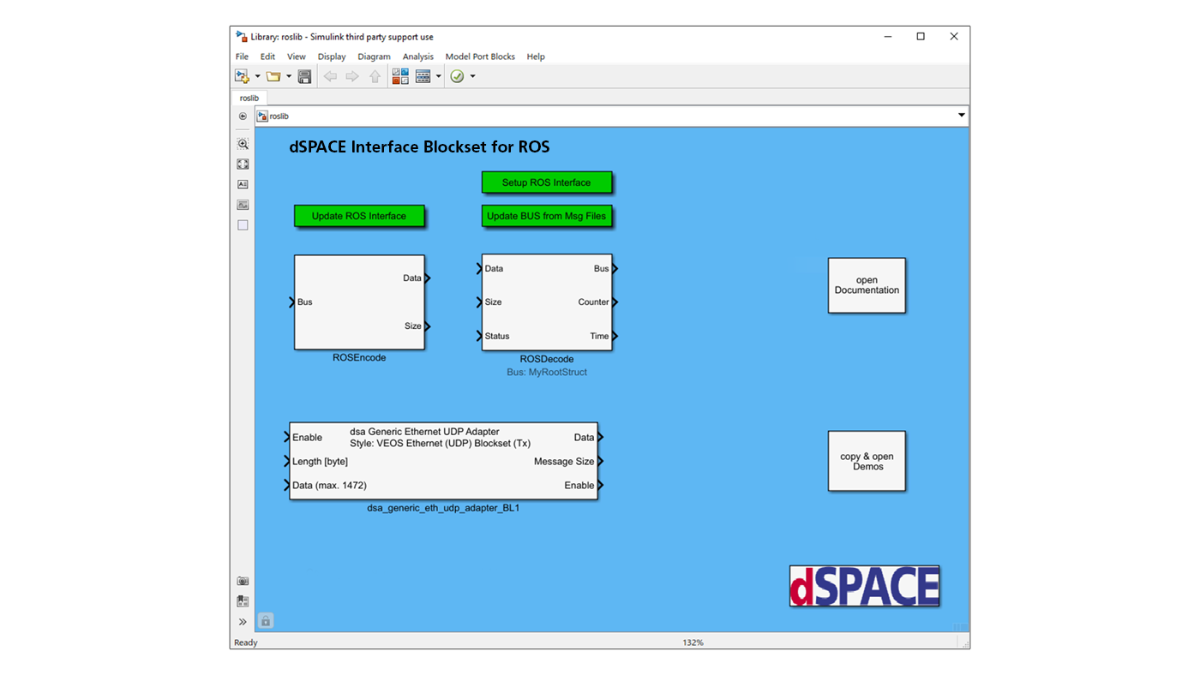
dSPACE Interface Blockset for ROS提供了一种易于使用的方法,用于在dSPACE实时系统和ROS之间交换数据。
- Simulink ® 模块集,方便dSPACE平台和ROS之间的通信
- 支持ROS 1和ROS 2
- 从Simulink中创建ROS消息
- 导入现有ROS消息文件

应用领域
高级驾驶辅助系统和自动驾驶(ADAS/AD)的功能需要多种异构数据流,如摄像头、雷达和激光雷达数据。Robot Operating System (ROS)是一个开源框架,被广泛用于这些ADAS/AD功能的原型开发。通过dSPACE Interface Blockset for ROS,原型开发、基于dSPACE PC仿真平台VEOS的测试、实时硬件(MicroAutoBox和SCALEXIO)和ROS相结合,以实现原型开发感知和传感器融合算法。
主要优点
dSPACE Interface Blockset for ROS提供了一种易于使用的方法,用于在dSPACE实时系统和ROS之间交换数据。模块集包含用于管理不同任务的模块集。除了通过将Simulink ® 总线编码到TCP(传输控制协议)或UDP 1) (User Datagram Protocol)包发布ROS话题,以及通过将TCP/UDP 1) 包解码为Simulink总线订阅ROS话题外,它还允许设置基本参数、更新ROS Interface和导入ROS消息。
| Functionality | Description |
|---|---|
| General |
|
| Supported ROS versions |
|
| Limitations |
|
-
- 在线观看
- 下载
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。