dSPACE Interface Blockset for ROS
dSPACEリアルタイムシステムをRobot Operating System(ROS)に接続
dSPACE Interface Blockset for ROSを使用すると、dSPACEリアルタイムシステムおよびROS間のデータを使いやすい方法でやり取りすることができます。
- dSPACEプラットフォームおよびROS間の通信を容易に行うためのSimulink ® ブロックセット
- ROS 1とROS 2の両方をサポート
- Simulink内からROSメッセージを作成
- 既存のROSメッセージファイルをインポート

適用分野
先進運転支援システムおよび自動運転(ADAS/AD)の機能には、カメラ、レーダー、LiDARなど、異種のデータストリームが必要となります。Robot Operating System(ROS)はオープンソースのフレームワークであり、これらのADAS/AD機能のプロトタイピングに幅広く利用されています。dSPACEのPCベースのシミュレーションプラットフォームであるVEOSやMicroAutoBoxおよびSCALEXIOといったリアルタイムハードウェアを使用すると、プロトタイピングしたりテストしたりできますが、これにdSPACE Interface Blockset for ROSを組み合わせると、認知およびセンサフュージョンアルゴリズムのプロトタイピングというROSの利点も追加できるようになります。
主な利用効果
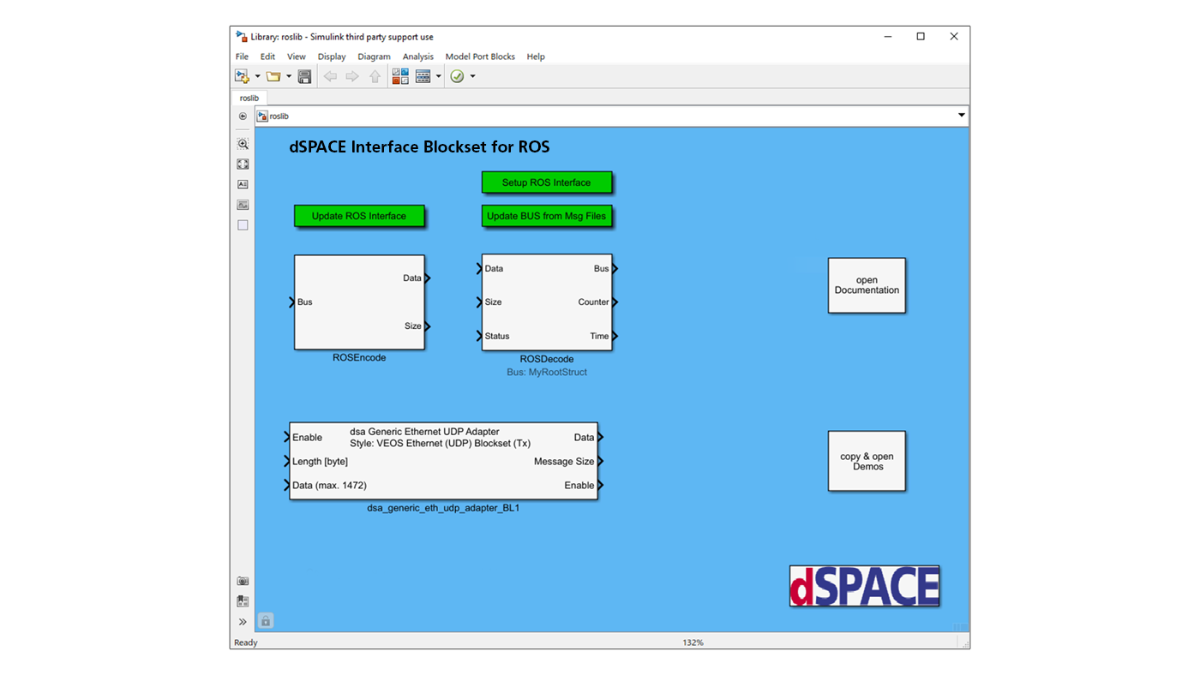
dSPACE Interface Blockset for ROSを使用すると、dSPACEリアルタイムシステムおよびROS間のデータを使いやすい方法でやり取りすることができます。このブロックセットには、多様なタスクを管理する一連のブロックが含まれています。つまり、Simulink ® バスをTCP(Transmission Control Protocol)またはUDP 1) (User Datagram Protocol)パッケージにエンコードしてROSのトピックを配信したり、TCP/UDP 1) パッケージをSimulinkバスにデコードしてROSのトピックを購読したりするコア機能を使用できるだけでなく、基本パラメータの設定、ROSインターフェースのアップデート、およびROSメッセージのインポートが可能になります。
| 機能 | 説明 |
|---|---|
| 全般 |
|
| サポートされるROSバージョン |
|
| 制限事項 |
|
-
- オンライン表示
- ダウンロード
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き