dSPACE Interface Blockset for ROS
Connexion des systèmes temps réel dSPACE au Robot Operating System (ROS)
Le dSPACE Interface Blockset for ROS fournit une méthode facile à utiliser pour échanger des données entre les systèmes en temps réel dSPACE et le ROS.
- Blockset Simulink ® pour une communication aisée entre les plateformes dSPACE et ROS
- Support de ROS 1 et ROS 2
- Création de messages ROS depuis Simulink
- Importation des fichiers de messages ROS existants

Domaines d’application
Les fonctions des systèmes d'assistance au conducteur et de conduite autonome (ADAS/AD) nécessitent de multiples flux de données hétérogènes tels que les caméras, les radars et le lidar. Le Robot Operating System (ROS) est un cadre open source largement utilisé pour le prototypage de ces fonctions ADAS/AD. Grâce au dSPACE Interface Blockset for ROS, la puissance de prototypage et de test offerte par la plateforme de simulation dSPACE basée sur PC VEOS et le matériel temps réel (MicroAutoBox et SCALEXIO) est combinée aux avantages de ROS pour le prototypage des algorithmes de fusion et de perception des capteurs.
Avantages majeurs
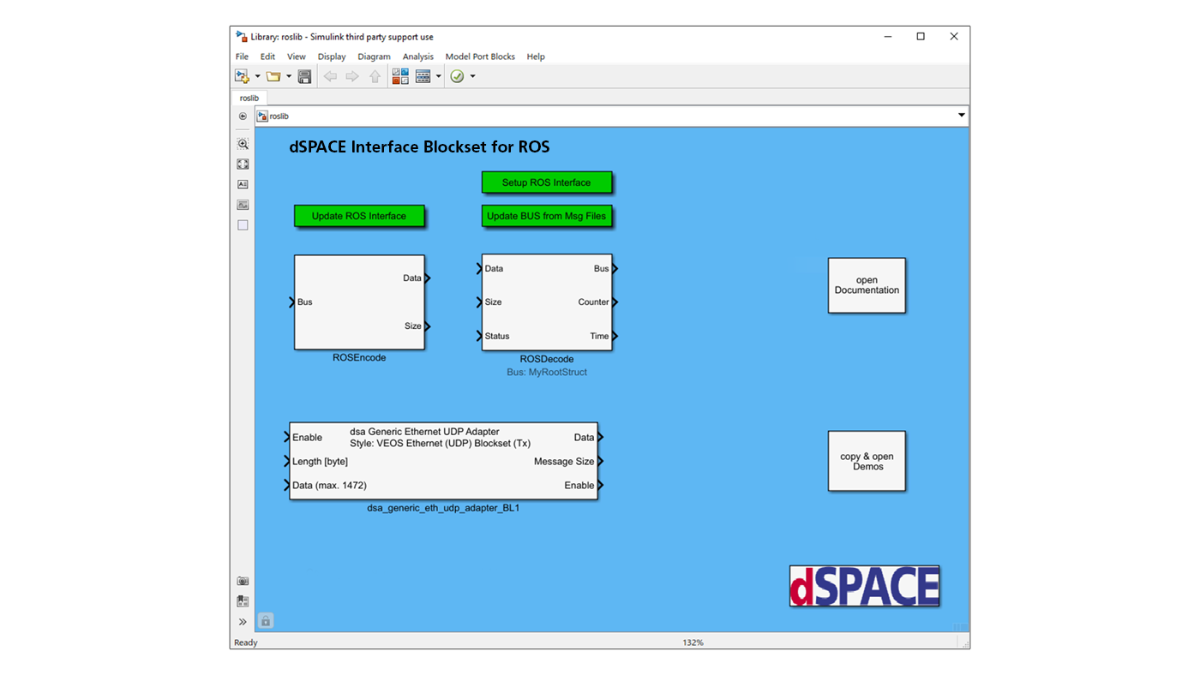
Le dSPACE Interface Blockset for ROS fournit une méthode facile à utiliser pour échanger des données entre les systèmes temps réel dSPACE et le ROS. Le blockset contient un ensemble de blocs permettant de gérer diverses tâches. Il permet de configurer des paramètres de base, de mettre à jour l'interface ROS et d'importer des messages ROS, en plus de la fonctionnalité principale de publication des sujets ROS en encodant les bus Simulink ® en paquets TCP (Transmission Control Protocol) ou UDP 1) (User Datagram Protocol), et en s'abonnant aux sujets ROS en décodant les paquets TCP/UDP 1) en bus Simulink.
| Functionality | Description |
|---|---|
| General |
|
| Supported ROS versions |
|
| Limitations |
|
-
- Afficher en ligne
- Téléchargement
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.