dSPACE Interface Blockset for ROS
Anbindung von dSPACE Echtzeitsystemen an das Robot Operating System (ROS)
Das dSPACE Interface Blockset for ROS bietet eine intuitive Methode für den Datenaustausch zwischen dSPACE Echtzeitsystemen und ROS.
- Simulink ® -Blockset für einfache Kommunikation zwischen dSPACE Plattformen und ROS
- Unterstützung von ROS 1 und ROS 2
- Erstellung von ROS-Nachrichten aus Simulink
- Import vorhandener ROS-Nachrichten

Anwendungsbereiche
Funktionen für anspruchsvolle Fahrassistenzsysteme und autonomes Fahren (ADAS/AD) erfordern mehrere heterogene Datenströme wie die von Kameras, Radar und Lidar. Das Robot Operating System (ROS) ist ein Open-Source-Framework, das für die Erstellung von Prototypen dieser ADAS/AD-Funktionen weitverbreitet ist. Durch das dSPACE Interface Blockset for ROS wird die Leistungsfähigkeit der PC-basierten Simulationsplattform VEOS und der Echtzeit-Hardware (MicroAutoBox und SCALEXIO) mit den Vorteilen von ROS für das Prototyping von Perzeptions- und Sensorfusionsalgorithmen kombiniert.
Vorteile
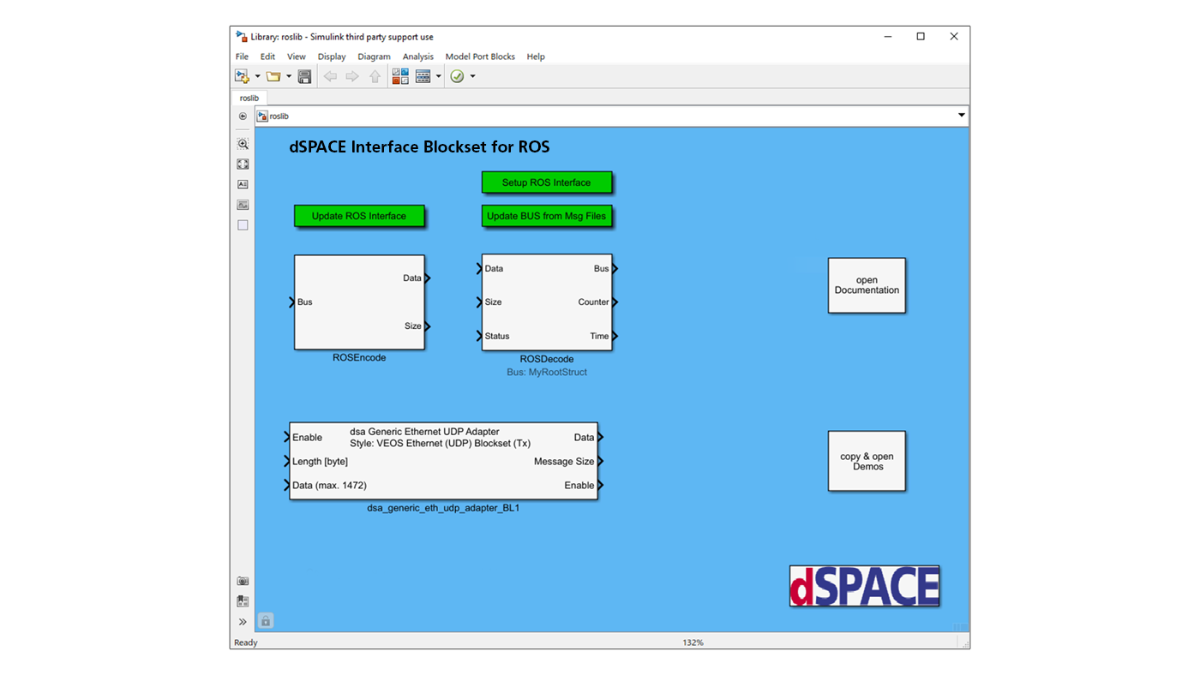
Das dSPACE Interface Blockset for ROS bietet eine intuitive Methode für den Datenaustausch zwischen dSPACE Echtzeitsystemen und ROS. Das Blockset enthält mehrere Blöcke, um unterschiedliche Aufgaben zu verwalten. Es ermöglicht die Festlegung grundlegender Parameter, die Aktualisierung der ROS-Schnittstelle und den Import von ROS-Nachrichten, zusätzlich zur Kernfunktionalität, also dem Veröffentlichen von ROS-Themen durch Kodierung von Simulink®-Bussen in TCP (Transmission Control Protocol) UDP 1) (User Datagram Protocol)-Pakete sowie dem Abonnieren von ROS-Themen durch Dekodierung von TCP/UDP 1) -Paketen in Simulink-Busse.
| Functionality | Description |
|---|---|
| General |
|
| Supported ROS versions |
|
| Limitations |
|
-
- Online-Ansicht
- Download
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.