Radarmodul
Realistische Simulation von Radarsignalen
Simulation der Sensorumgebung basierend auf mathematisch formulierten physikalischen Gesetzen. Es ermöglicht die Einspeisung von Radardaten in eine Prozesskette in verschiedenen Formaten.
The Sensor Simulation products based on MotionDesk can no longer be purchased.
Instead, we offer our new generation of visualization and sensor simulation software: AURELION.
For more information on the product life cycle and the dSPACE product life cycle model in general, please refer to our website.
-
SensorSim 1.1
Realistischere Sensorsimulation und höhere Leistung.
-
AI-in-the-Loop
Neues Testsystem zur Absicherung eines autonomen, KI-basierten Fahrzeugs mittels realistischer Sensorsimulation.
Weitere Informationen
-
Kino für Sensoren
Aktuelle dSPACE Entwicklungen für das autonome Fahren.
-
Objektive Erfassung
Absichern von Funktionen für autonomes Fahren mittels realistischer Sensorsimulation
-
Sensor Simulation: Der Schlüssel in der Funktionsentwicklung für autonomes Fahren
In dieser Webinar-Aufzeichnung zeigt dSPACE die verschiedenen dSPACE Lösungen für die Sensorsimulation – angefangen bei Ground-Truth-Sensormodellen bis hin zur Rohdatensimulation mit GPU-basierten physikalischen Sensormodellen.
Anwendungsbereich
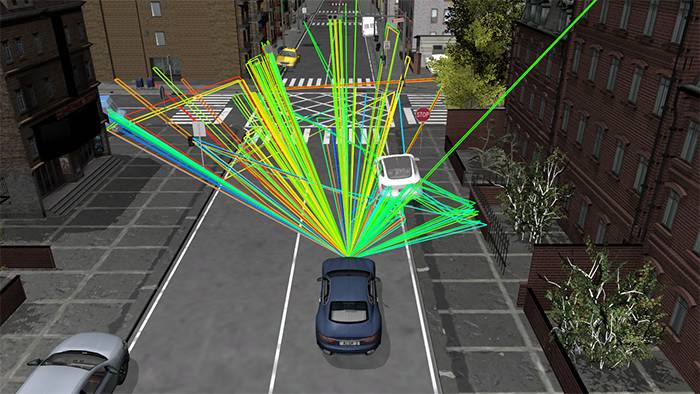
Das Modul bietet eine realistische, physikalisch basierte Simulation von Radarsignalen in einer virtuellen Umgebung mit einer Vielzahl von Konfigurationsmöglichkeiten und ist Teil von Sensor Simulation. Die Umgebungssimulation basiert auf der Raytracing-Technologie. Darüber hinaus kann die Funktionalität der Radarsimulation für Datenverarbeitungsalgorithmen über eine API erweitert werden. Standardmäßig werden zwei Verarbeitungsvorlagen mit dem Modul ausgeliefert. Man gibt die Kanalimpulsantwort der Umgebung als Strahlen zurück, die Informationen über Azimutwinkel, Elevationswinkel, Entfernung und die Relativgeschwindigkeit der getroffenen Objekte enthalten. Zusätzlich wird das reflektierte elektrische Feld als Polarisationsmatrix zurückgegeben. Der Kunde kann diese Daten weiterverarbeiten, zum Beispiel zur Erzeugung von Rohdaten wie Spannungen für die Analog-Digital-Wandler (ADC) eines realen Sensors.
Die andere Verarbeitungsvorlage gibt eine Erkennungsliste zurück. Die Radarreaktion der Umgebung wird ausgewertet und die Signale werden in einem einstellbaren vierdimensionalen Raster (drei räumliche und eine Geschwindigkeitsdimension) sortiert.
Komponenten und Eigenschaften
- Echtzeitfähiges Raytracing zur Berechnung des Umgebungsmodells
- Mehrwegeausbreitung mit einer definierbaren Anzahl von Hops
- Spiegelreflexion
- Diffuse Streuung
- Konfiguration über MotionDesk mit einer spezifischen GUI
- Positionierung und Ausrichtung des Sensors
- Radarspezifische Eigenschaften, zum Beispiel Frequenz, Abstand und Strahlcharakteristik
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.