AURELION bietet eine hochwertige Visualisierung und berechnet realistische Sensordaten, um Ihre Perzeptions- und Fahrfunktionen zu testen und zu validieren.
Flexible Nutzung
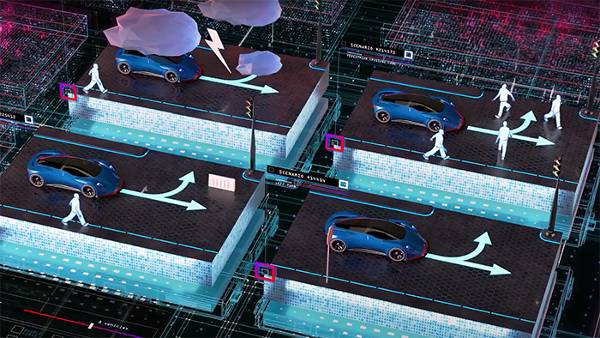
Testen und validieren Sie Ihre ADAS/AD-Perzeptions- und Fahrfunktionen in HIL-, SIL- und Cloud-Szenarien.
Kostenlose Ground-Truth-Daten
Liefert pixelgenaue Ground-Truth-Daten für das automatische Testen und Validieren Ihrer Perzeptionsalgorithmen.
Sensor Simulation
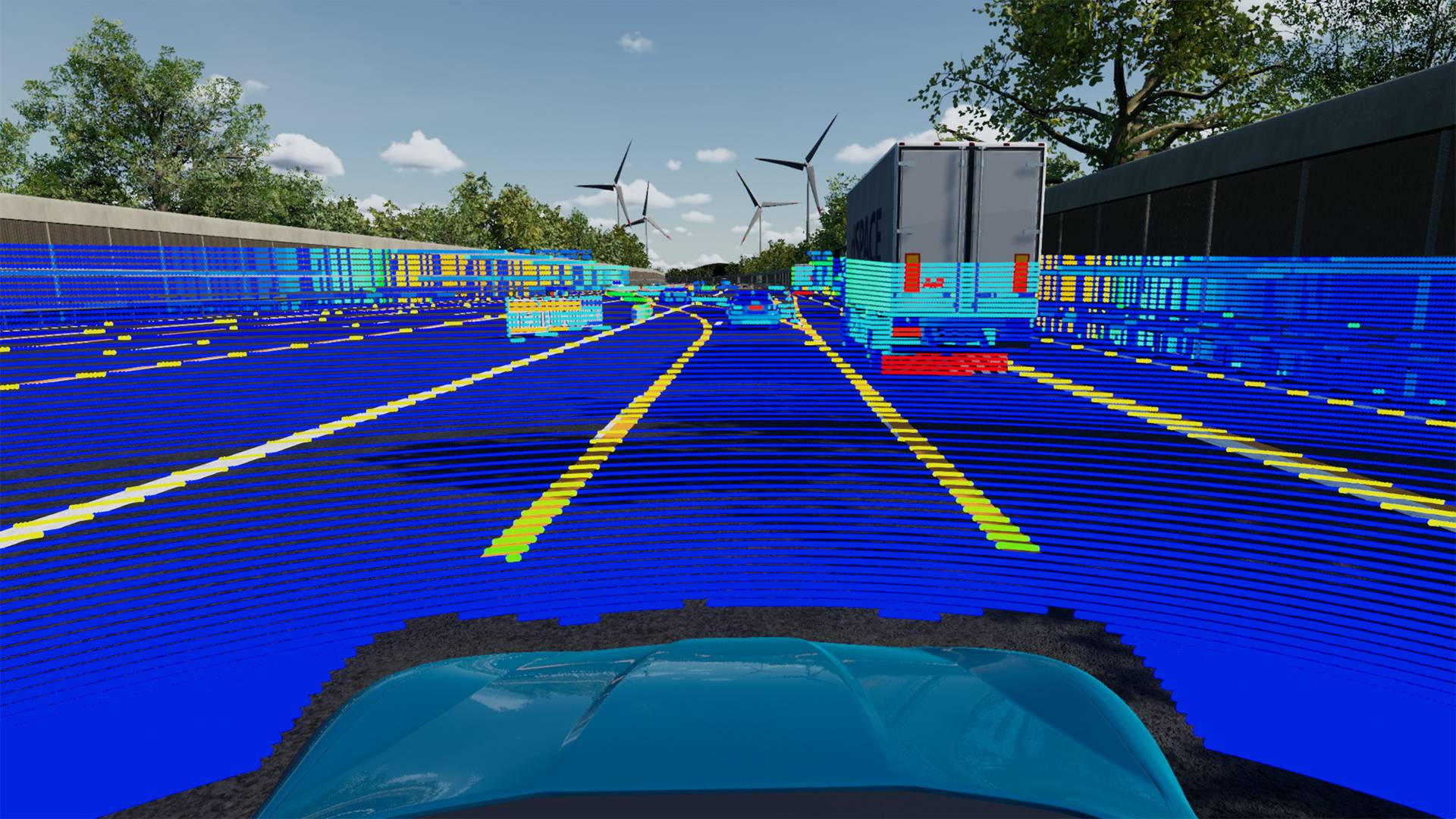
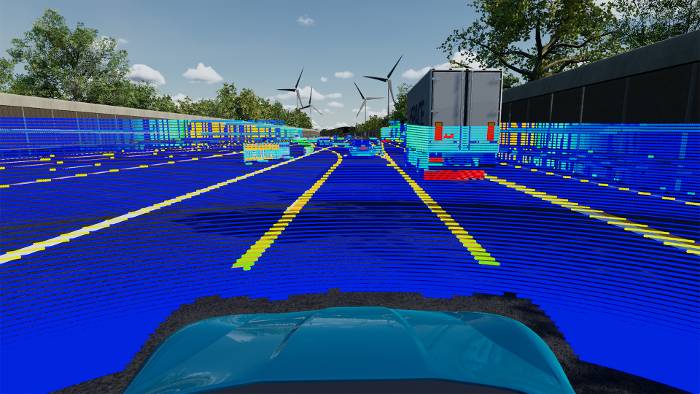
Hochgradig realistische und deterministische Simulation von Kamera-, Radar- und Lidarsensoren.
Realistische Umgebung
Automatische Generierung von 3D-Straßen und Umgebungen auf der Grundlage von OpenDrive und ModelDesk.
Was ist AURELION?
AURELION ist eine flexible Software-Lösung für Sensorsimulation und Visualisierung. AURELION ermöglicht Ihnen, realistische Sensordaten in Ihre Prozesse zur Entwicklung, zum Test und zur Validierung von Perzeptions- und Fahrfunktionen zu integrieren. Dieselben Modelle können in verschiedenen Phasen der Entwicklung eingesetzt werden zum Beispiel bei Hardware-in-the-Loop (HIL), Software-in-the-Loop (SIL) und Vehicle-in-the-Loop (VIL).
- Hochintegrierte dSPACE Simulationswerkzeuge machen die Integration von AURELION schnell und einfach.
- Unsere Sensorsimulationsmodelle stellen sicher, dass Sie die höchste Qualität erhalten und gleichzeitig Ihre Echtzeitanforderungen erfüllen.
- Offene Schnittstelle zur Integration eigener Sensormodelle bringt die Simulation noch näher an die Realität.
- Flexible Integration von AURELION in die Simulation von Drittanbietern bringt unsere Sensorsimulation in Ihre Umgebung.
Anwendungsbereiche für AURELION
AURELION eignet sich für eine breite Palette von Anwendungsfällen und Konfigurationen. Die Lösung kann in verschiedenen Phasen der Entwicklung eingesetzt werden, zum Beispiel bei Hardware-in-the-Loop (HIL)-Tests, Software-in-the-Loop (SIL)-Tests, Vehicle-in-the-Loop (VIL)-Tests und bei der parallelen Validierung in der Cloud.
Beispielhafte Anwendungsbereiche:
- Automobilindustrie, autonome Fahrzeuge, ADAS
- Landwirtschaft
- Nutzfahrzeuge
-
Automatisierte mobile Roboter










Hauptvorteile für die Sensorsimulation
Die 3D-Rendering-Engine, die hochpräzisen dSPACE Simulationsmodelle, realistische 3D-Assets und hochauflösende Materialinformationen ermöglichen die genaue Simulation von Fahrzeugsensoren und -umgebungen unter verschiedenen Wetter- und Lichtbedingungen.
Sensormodelle

Kamerasensormodell
Simulieren Sie realistisch eine Kamera mit einem geradlinigen oder Fischaugenobjektiv und die entsprechende Sensorumgebung.
- Naturgetreue Grafiken, Lichteffekte sowie konfigurierbare realistische Linsenprofile
- Optionen für Bildänderung und Fehlerinjektion
- Konfigurierbarer Farbfilter für die Ausgabe von Sensorrohdaten
- Nutzen Sie Ground-Truth-Informationen wie semantische Segmentierung, optischen Fluss und 2D Bounding Boxes, um Ihre Algorithmen zu testen und zu validieren.

Radarsensormodell
Simulieren Sie hochrealistische synthetische Radardaten für alle Injektionsschichten in Echtzeit.
- Ausgabe von Kanalimpulsantworten, Rohdaten, Erkennungslisten und Objektlisten verfügbar
- Radaroptimierte Materialien und Mehrweg-Raytracing sorgen für Effekte wie bei realen Messungen, z. B. Geisterziele
- Adaptiver Strahlenstart garantiert genaue Ergebnisse und optimale Leistung auch bei Mehrfachantennenaufbauten

Lidarsensormodell
Realistische Simulation eines Lidarsensors und der entsprechenden Sensorumgebung.
- Ausgabe einer Punktwolke mit realistischer Berechnung der Reflektivitätswerte auf der Basis lidarspezifischer Materialien
- Unterstützung für Scanning- und Flash-basierte Sensoren
- Realistische Bewegungsverzerrungseffekte mit konfigurierbaren Zeitverschiebungen für jeden Strahl
Ground Truth
Um Computervision zu entwickeln und zu testen, ist es notwendig, den Sensordaten Informationen über die tatsächliche Situation hinzuzufügen. Einerseits werden sie für automatische Tests von Perzeptionsalgorithmen verwendet, andererseits können sie auch zum Training neuronaler Netze eingesetzt werden. Im Vergleich zu Ground-Truth-Daten aus realen Daten erzeugt AURELION die verschiedenen Ground-Truth-Varianten pixelgenau und kostenlos. Für jede Kategorie wie Fußgänger, Autos und Verkehrszeichen.
- Spezielle Ground-Truth-Ausgabe für Kamera, Radar und Lidar verfügbar
- Die Ausgabe wird automatisch parametriert, um sie an Ihre Sensoren anzupassen.
- Synchronisiert mit den rohen Sensordaten, kann Ground Truth leicht über eine C-API erreicht werden.

2D Bounding Boxes
2D Bounding Boxes sind zweidimensionale Boxen, die Objekte im Kamerasensor umschließen. Sie können verwendet werden, um automatisch zu testen, ob Ihr Perzeptionsalgorithmus die verfügbaren Objekte in Ihrer Szene korrekt identifiziert. Die Informationen werden als Binärdaten angegeben, so dass Sie die Informationen für automatische Tests verwenden können.
-
Parametrisiert für Ihren Kamerasensor, um pixelgenaue Ergebnisse zu erzielen
Bounding Boxes - Enthält auch Informationen über die Klasse und die Instanz eines jeden Objekts
- Gefiltert nach der Art der Objekte, die Sie benötigen
- Kann konfiguriert werden, um verdeckte Bereiche zu integrieren oder zu verwerfen

Semantische Segmentierung
Die in AURELION enthaltene semantische Segmentierung von Bildern liefert Annotationen auf Pixelebene zu Bildbereichen. Beim Testen und Trainieren künstlicher Intelligenz, insbesondere beim autonomen Fahren, können diese Informationen dazu verwendet werden, dass neuronale Netze lernen, welche Muster oder Texturen zu welcher semantischen Klasse von Objekten gehören.
Anschließend können solche Netze für so unterschiedliche Anwendungsfälle wie Bilderzeugung, Domänenanpassung, Fahrspurerkennung oder Erkennung befahrbarer Bereiche eingesetzt werden.
- Anpassbare Kategorien
- Gleiche Kategorien für Kamera, Radar und Lidar
- Ausgabekategorie-ID und Instanz-ID

Ground Truth für aktive Sensoren
Ground Truth ist auch für unsere aktiven Sensoren wie Radar und Lidar verfügbar. Dazu gehören zum Beispiel Informationen über die Kategorie und die Instanz für jede Erfassung eines Radarsensors und jeden Punkt innerhalb einer Punktwolke. Diese Informationen lassen sich leicht gewinnen und für das Training neuronaler Netze nutzen.
- Kategorie-IDs und Instanz-IDs sind für jeden Sensor identisch, damit die Sensoren in den Sensordaten leicht identifiziert werden können.
- Unterschiedliche Ausgabemodi erfordern unterschiedliche Arten von Ground-Truth-Informationen (diese können leicht über eine C-API beschafft werden).
3D-Umgebung

Unsere Software unterstützt Standards wie OpenScenario und OpenDrive und ermöglicht es uns, automatisch eine 3D-Umgebung für Sie zu generieren. So sparen Sie Zeit und Aufwand und können sich auf das Wesentliche konzentrieren – Ihre Simulation.
- Wir stellen Werkzeuge zur Verfügung, mit denen Sie die Straße modifizieren und auch 3D-Assets zur Umgebung hinzufügen können.
- Straßen und Gelände werden automatisch auf Basis von OpenDrive-Dateien generiert.
- Unsere 3D-Asset-Bibliothek enthält sensorspezifische Materialien für eine sensorrealistische Simulation.
- Für einen schnellen Start bieten wir mehrere realitätsnahe Umgebungen in Stadtgebieten und auf Autobahnen.

Unterschiedliche Anpassungsoptionen
Wir wissen, dass jede Simulation einzigartig ist, und dass Sie manchmal die Straße oder die 3D-Umgebung ändern müssen, um Ihre speziellen Anforderungen zu erfüllen. Deshalb bietet Ihnen unsere Software auch die Werkzeuge, um diese Änderungen vorzunehmen, und gibt Ihnen die Flexibilität und Kontrolle, eine maßgeschneiderte Umgebung zu schaffen, die genau Ihren Anforderungen entspricht.
AURELION Manager

Mit dem AURELION Manager können Sie Ihre virtuellen Sensoren parametrieren und auf einer 3D-Darstellung Ihres Ego-Autos platzieren, wodurch Sie die vollständige Kontrolle über Ihre Sensorkonfiguration haben. Unsere Software-Lösung ermöglicht es Ihnen, Ihre AURELION-Instanzen zu optimieren und Ihre Arbeitsabläufe zu rationalisieren.
- Importieren Sie die 3D-Darstellung Ihres Fahrzeugs in AURELION.
- Visualisieren Sie Ihre Sensorinstanzen auf einem 3D-Modell Ihres Ego-Fahrzeugs.
- Treffen Sie genaue Entscheidungen über die Platzierung Ihrer Sensoren.
- Verteilen Sie die Last, indem Sie angeben, welcher Sensor auf welchem PC berechnet werden soll.
- Integrieren Sie AURELION nahtlos in Ihre Testumgebung mit Automation API
Optionale Produkte





Was unsere Kunden sagen
Mit der sensorrealistischen Simulationslösung AURELION gelingt es, realistische Sensordaten in die Prozesse für Entwicklung, Test und Validierung einer breiten Palette von Perzeptions- und Fahrfunktionen zu integrieren.

Mit der dSPACE Simulationslösung haben wir eine flexibel konfigurierbare Möglichkeit, die korrekte Funktion von Sensoren und Fahrerassistenzsystemen realer Fahrzeuge in unseren Testzentren effizient und zuverlässig zu überprüfen.

Dank der sensorrealistischen Simulation in AURELION konnten wir bei der Entwicklung unserer Toter-Winkel-Informationssysteme zum Beispiel die üblichen äußeren Einflüsse wie Mehrwegreflexionen durch Baustellensituationen oder Randbebauung sowie Einflüsse im Stadtverkehr in den unterschiedlichsten Varianten berücksichtigen.

Die Lösungskompetenz von dSPACE in der Simulation und Validierung hat uns voll überzeugt und uns geholfen, unser ehrgeiziges Projekt der autonomen Kehrmaschine effizient umzusetzen.

Mit den sensorrealistischen Simulationsmodellen von dSPACE gelingt es, aus komplexen 3D-Szenarien Sensorrohdaten zu generieren.

Mit dem sensorrealistischen Kameramodell können wir hochkomplexe Testaufgaben zuverlässig virtuell simulieren.




Zertifiziert nach ISO 26262
AURELION wurde vom TÜV SÜD nach ISO 26262 für sicherheitsrelevante Systeme in Kraftfahrzeugen zertifiziert. Das Tool ist somit für den Einsatz in sicherheitsrelevanten Entwicklungsprojekten nach ISO 26262:2018 für alle Automotive Safety Integrity Level (ASIL) geeignet.
Das heißt: Fahrzeughersteller und Zulieferer können AURELION von der ISO-26262-Qualifizierung ihrer gesamten Prozesse ausnehmen und sich auf den Nachweis der funktionalen Sicherheit der eigenen Prozessketten konzentrieren.

Neueste AURELION Version 23.3
Die neue Version bietet zahlreiche Verbesserungen in der Benutzerfreundlichkeit von AURELION und AURELION Manager, um Ihre Arbeitsabläufe noch schneller zu gestalten.
- Protokollierungssystem im AURELION Manager
- Konfiguration der zusammengesetzten Ansicht im AURELION Manager
- Platzierung eines Lidar-Sensors hinter einer Windschutzscheibe
- Höhere Dynamikbereiche für Kamerasensoren dank der Implementierung einer reversiblen Tonemapping-Funktion.
... und vieles mehr.
Unterstützung für AURELION-Anwender
Links zu detaillierten technischen Informationen und zum Kundendienst. Der Zugang kann eine Registrierung erfordern.
