What is the future of periodic technical inspection (PTI) for autonomous and automated vehicles? This is the question that the Germany-based Kraftfahrzeug-Überwachungsorganisation freiberuflicher Kfz-Sachverständiger (KÜS, motor vehicle inspection association of freelance motor vehicle experts) has been investigating. With its innovative KÜS DRIVE test line, it is testing the limits of what is possible. dSPACE is providing active support to the organization.
All car owners in Germany know that their vehicle has to regularly pass a mandatory PTI. In accordance with the German Road Traffic Licensing Regulations (StVZO), a test engineer examines safety-relevant mostly mechatronic, vehicle components such as lighting, brakes, the drivetrain under the vehicle, tires, etc., with regard to design, condition, function, and effect. These examinations are supported by a main inspection adapter, which communicates with the vehicle via the onboard diagnosis (OBD) interface. Due to the rapid technological development of vehicles, which is characterized in particular by the integration of advanced driver assistance systems (ADAS), the test contents of the PTI must also keep pace with this development, in order to continue to ensure road safety. Camera sensors have long been monitoring lane compliance and alerting drivers when they cross the sidelines. And if the car comes dangerously close to road users ahead, the autonomous emergency braking system (AEBS) intervenes and eases the situation.
With the dSPACE simulation solution, we have a flexibly configurable way to efficiently and reliably check the correct functioning of sensors and driver assistance systems of real vehicles in our test centers.

With its expertise in the field of periodic technical inspections, KÜS is a valued and promising development partner for us.

With KÜS DRIVE; we offer a solution to improve vehicle safety and functional safety of driver assistance systems and of automated driving over the entire product life cycle.


Safe Over the Entire Vehicle Life Cycle
The first drivers on the road with cars that recognize their surroundings and drive partly autonomously, called level 2 and level 3 vehicles, rely on these and other sensors. “But how can the functional reliability of these sensitive components be ensured over the entire vehicle life cycle?” asks Dr. Thomas Tentrup, head of development at KÜS, addressing, the industry-wide question. To meet this safety-critical challenge, the German testing organization KÜS, with the support of dSPACE, has developed and implemented the KÜS DRIVE test line. This makes it possible to stimulate a vehicle's environment sensors without any manipulation of the test cars and without accessing their relevant ADAS control units. This solution facilitates the performance of relevant relevant, scenario-based, effect-principle tests in accordance with the United Nations Economic Commission for Europe (UN-ECE) and the New Car Assessment Program (NCAP). Non-contact testing of imaging sensors using physical inputs such as radar, lidar, ultrasound, or light waves is referred to as over-the-air (OTA) testing.






OTA Stimulation of the Vehicle Sensors
“For valid and reproducible results, we use the vehicle-in-the-loop (VIL) simulation method, in which a real vehicle is tested in a virtual environment,” explains Ahmet Karaduman, consultant at dSPACE. He adds: “This form of validation can be used not only in PTI, but also in end-of-line testing in automotive production, type approval/homologation, and R&D purposes.”
During the VIL test, the vehicle is located on Dürr Assembly's steerable roller dynamometer ‘x-road curve’ and is able to be quickly and accurately accelerated, braked, or steered to the right and left by the driver, according to the respective test scenario to be run. Due to the technical characteristics of the chassis dynamometer, the vehicle always remains positioned longitudinally with respect to the axis of symmetry of the dynamometer and can travel at speeds of up to 130 km/h. Using the software interface between the steerable chassis dynamometer and the dSPACE tool chain, it is possible to transfer the real physical movements of the vehicle to a digital shadow. The shadow is calculated in real time on a simulator from dSPACE, together with the vehicle environment. The simulation feeds a monitor and radar target simulator to the OTA stimulation of the camera and radar sensors.
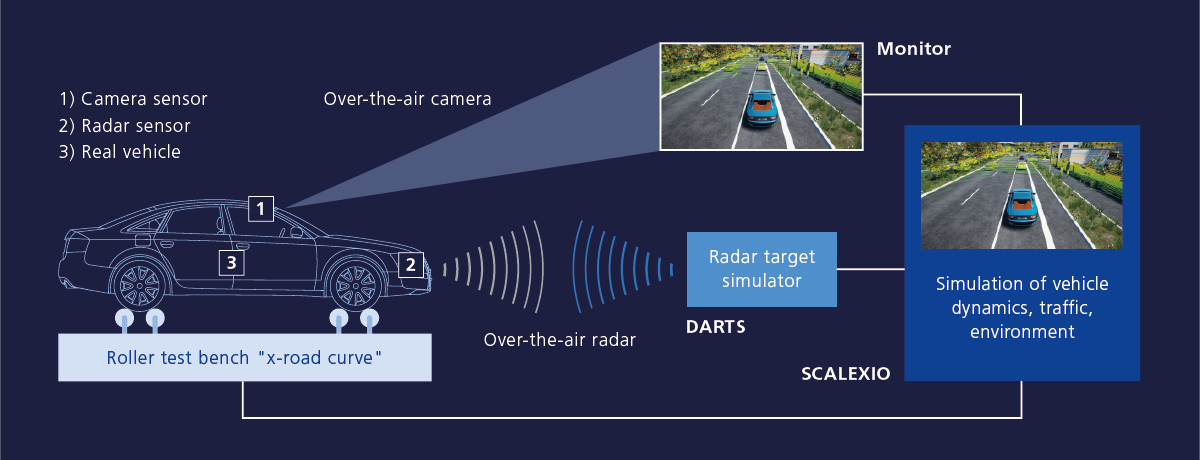
Schematic representation of the vehicle-in-the-loop (VIL) test in the KÜS DRIVE test line. The setup consists of a steerable chassis dynamometer (x-road curve) and a simulator (SCALEXIO). The virtual vehicle environment generated by the simulator is made available to vehicle sensors at the physical level by means of over-the-air (OTA) processes. The sensors of the vehicles under test record physical quantities and the vehicle assistance systems can respond to these.

The Test Setup for the Sensor System
“A monitor and a radar antenna are integrated into the test line and located directly in front of the vehicle under test. Both can be positioned horizontally, vertically and axially by means of the flexible gantry system "x-around" from Dürr Assembly Products,” says Karaduman, describing the setup for the sensor test.
The monitor stimulates the vehicle's camera with environment and road scenarios animated by the sensor-realistic simulation solution AURELION in the form of a 3-D world. The visualization is used to check whether the camera sensor of the vehicle under test (VUT) correctly detects the relevant objects. The correct functioning of the lane keeping assistance system (LKAS) and the lane departure warning system (LDWS) is also tested with suitable road simulations.
To test the radar sensor, the antenna of the dSPACE Automotive Radar Test Systems (DARTS) radar target simulator is positioned directly in front of the sensor. DARTS emits the radar reflections of a simulated target object. The reflection waves accurately reflect the distance, size, and speed of the object, thereby stimulating the radar sensor. This enables reproducible testing of adaptive cruise control (ACC) and autonomous emergency braking system (AEBS) which is safe for the test engineers.
The homogeneous and coordinated hardware and software components of the test bench thus enable a stable test sequence in real time. If required, test cases can be reproduced exactly to prove the successful elimination of errors. “Reproducible results are essential for the evaluation of technical tests, especially during a periodical inspection,” notes Dr. Tentrup.

The dSPACE simulation solutions create a reproducible, realistic virtual world including complex driving scenarios.
Looking to the Future
KÜS recognized at an early stage that automation in the automotive sector entails a wide range of safety issues for road-legal vehicles with a high degree of automation that need to be resolved. In order to keep pace with this technological progress in the field of functions for automated driving and driver assistance systems, the requirements for the periodic technical inspection regulated by law are constantly increasing.
“For this reason, KÜS launched a research project with the KÜS DRIVE with the aim of integrating the current test scopes of the main inspection into a test line in which the safety-relevant driver assistance systems can also be tested by means of OTA testing.” With DRIVE, we are working on the innovations of tomorrow, to advance solutions to improve vehicle safety and the functional safety of assistance systems and automated driving throughout the entire product life cycle,” explains Peter Schuler, CEO of KÜS.

Adapting PTI to Automated and Autonomous Vehicles (SAE Level 3)
Legally prescribed PTI not only contribute to the prevention of technical malfunctions but also increase road safety. Advanced driver assistance systems (ADAS) are capable of significantly reducing accidents caused by human error or incapacity. For this to happen, however, these systems must function error-free over the entire life cycle of the vehicle. Possible disruptive factors are:
- Aging of material and components
- Defective or faulty maintenance
- Manipulation of components and systems
- Unauthorized or excessive tuning
- Limits of self-diagnosis
The detection of technical defects and thus the maintenance of traffic safety is ensured, among other things, by the periodic inspection. For example, adaptive cruise control (ACC) and emergency braking assistants (AEB) can prevent rear-end collisions even at high speeds and thus contribute significantly to reducing the number of accidents. It is especially in these accidents, where a moving vehicle collides with a vehicle traveling in the same direction or a stationary vehicle, that many fatalities and serious injuries occur in addition to the high property damage. However, incorrect triggering of an emergency brake assistant that is not set correctly can also lead to rear-end collisions.

Periodic Check of Safety Systems
In the course of developments in the automotive sector, it is clear that the importance of driver assistance systems is changing. “While they were initially 'comfort systems' that made it easier for the driver to drive the car, they are increasingly evolving into 'safety systems’,” Karaduman explains. From this point of view, it becomes clear how indispensable it is to include these systems in the framework of periodic technical inspection and to create the legal basis for this.
The KÜS DRIVE test line already demonstrates a convincing technical solution concept for the new test scope requirements for the regular main inspection of automated vehicles. The safety of functions for automated driving can be tested and demonstrated in suitably equipped test centers over the life cycle of a vehicle.
Courtesy of KÜS (Kraftfahrzeug-Überwachungsorganisation freiberuflicher Kfz-Sachverständiger, which translates to “motor vehicle inspection association of freelance motor vehicle experts”)
dSPACE MAGAZINE, PUBLISHED JULY 2023