自動運転車両の開発において通常重視されるのは、人や物の輸送なります。しかしながら現在、Korean Institute of Industrial Technology(KITECH)では、自動運転が交通および輸送の領域を超えて重要な役割を果たすことを実証するため、自動運転型の路面清掃車を用いた検証を行っています。
KITECHでは、シナリオ生成サービスやシミュレーションソリューションであるAURELION、さらにはAutomotive Simulation Models(ASM)といったdSPACEのテクノロジを活用することで、将来の展開区域域で使用される自動路面清掃車のソフトウェアを検証するテストシステムを構築しました。この際に同チームが注力したのは、既存の計測データを使用して現実的なシナリオを生成することでした。

実際の道路を仮想的に表現
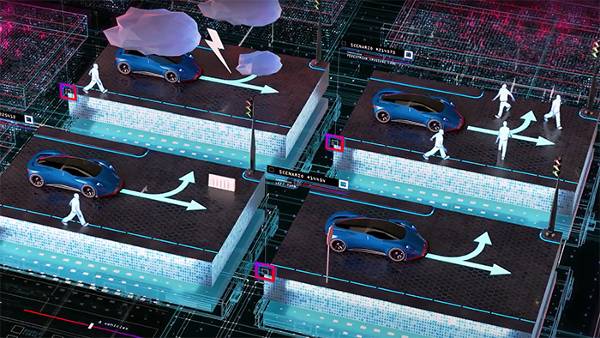
KITECHでは、韓国のピョンドン市の2.3 kmの街路を3Dの仮想環境の中で再現するため、車載センサで記録した計測データを使用しました。そしてこの展開区域(図1)に合わせて路面清掃車の動作に関するセンサリアリスティックなテストシナリオが生成され、それらが一通り実行されました。このプロジェクトの遂行には、dSPACEがシミュレーションおよび妥当性確認分野のパートナーとして注力を続けてきたソリューションが必要でした。これはdSPACEのツールチェーンが開発全体を通して、重要な役割を果たしたことを証明しています。
セーフティクリティカルなシナリオを統合
このシミュレーションの目的は、自動運転型の路面清掃車が道路上にある時に起こり得るさまざまなシナリオを検証することです。シナリオには、危機的な場面も、車両の方向転換といった日常的な場面も含まれます。このプロジェクトでは、位置の特定、プランニングロジックの構築、軌道の記録、車速の制御といったアルゴリズムの検証にも重点が置かれました。これらは、セーフティクリティカルな運転シナリオで用いるアルゴリズムにとって極めて重要でありながら、だからこそ実車によるテストドライブで検証することが困難なものです。

道路からシミュレーションへ
路面清掃車の無人運用の構想を現実のものにするうえで、コンピュータで生成したシナリオによるテストドライブは不可欠です。これらのシナリオを最大限、現実に近づけるには、モデルやデータができる限り高精度に現実世界を再現する必要があります。KITECHのテストシステムのセンサシミュレーションにおいてこの再現が実行される際、自動運転車両は仮想マップ内でセンサを使って道を探ろうとするため、最も重要なのは精度になります。

シミュレーションシナリオがほぼ自動で完成
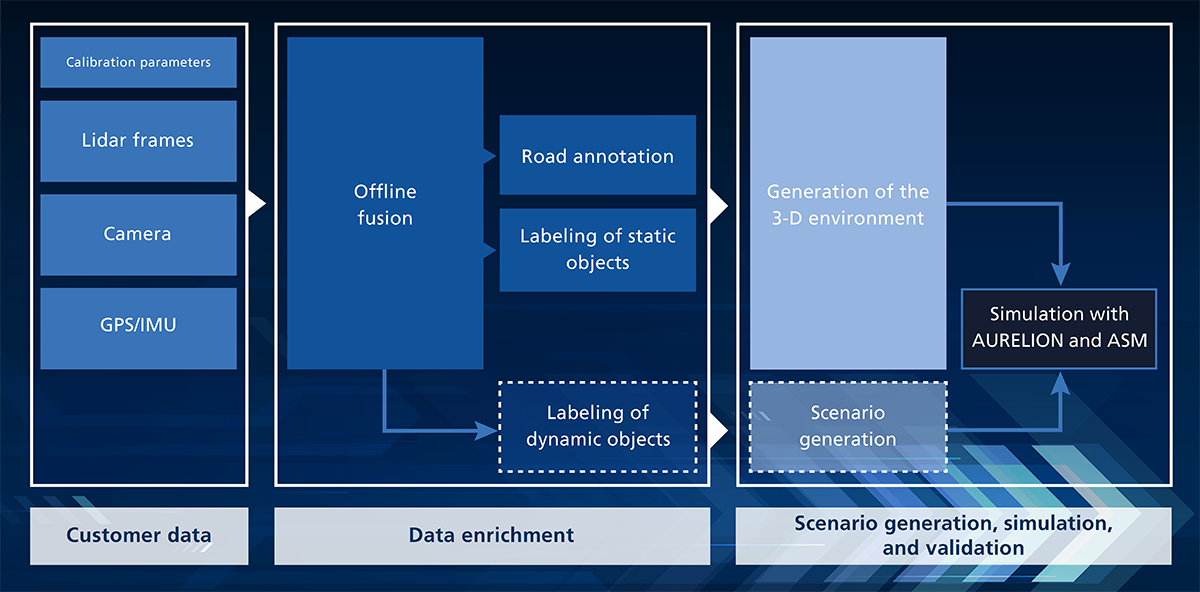
高度に自動化されたプロセス(図2)では、車載センサから得たデータを使用して、シミュレーションに必要な成果物(シミュレーションシナリオ)を作成します。まずはじめに、入手した計測データは時間と空間に基づいて、シーンや道路の状況に応じた座標系に配置されます。次に、AIでアノテーションを行って関連情報を抽出します。KITECHではここにおいて、dSPACEの子会社であるunderstand.ai社のツールを使用して必要なアノテーションを生成しました。そして次のステップとして、抽出された情報をシミュレーション可能なシナリオに変換します。それぞれのシミュレーションは、正確な道路モデルに基づいています。このプロジェクトでは、10の交差点とカメラで検出可能なすべての路面標識を含む2.3 kmのコースの道路モデルを使用しました。
高度な環境モデル
道路モデル以外にも、このシナリオにはコース付近のすべての静止オブジェクトを含む3Dの環境モデルが組み込まれており、70の建物、45のフェンス、壁、道路標識、信号機、街灯、樹木などが含まれています。環境モデルは物理ベースのLiDARシミュレーションで使用されているため、オブジェクトの素材は可能な限り現実に即してシミュレートされています。さらにこちらのシミュレーションシナリオは、他のトラフィックオブジェクトを表す動的オブジェクトによっても補完されています。トラフィックオブジェクトの種類、外観、および動作は、単純な動作モデルに基づいてランダムに定義されます。各種のトラフィックシナリオは、計測データから抽出してシミュレーションで再生することも可能です。
仮想環境での検証
新たに作成された仮想世界では今や、運転機能のさまざまな階層をテストすることができます。これには、畳み込みニューラルネットワーク(CNN)ベースで車両や信号機を検出したり、ボクセルグリッドやバウンディングボックスのフィルタリングによって障害物を検出したり、さらにはHDマップベースで軌道を計画したりする際に使用する各種の認知アルゴリズムも含まれています。シミュレーション時には、すべてのセンサに関連するセンサデータ(カメラ×7、LiDAR×4、レーダー×4、V2X、車両ステータス情報、およびGPS)が高度な現実性のままに再現されます。仮想環境内のバーチャルビークルは、計画された軌道をたどり、取得した障害物や環境の情報に合わせて速度を調整する必要がありますが、天候や交通量などのパラメータを変更すれば、異なる種類のシナリオをいくつでも生成し、それらを何千回でも走破することが可能です。そのためピョンドン市でプロトタイプが初めて現実の走行を迎える前の段階で重大な状況を検出しておくことができるのです。
Wongun Kim博士、KITECH
dSPACE MAGAZINE、2020年11月発行
KITECHについて
Korean Institute of Industrial Techology(KITECH)は、技術の移転と商用化に特化した研究機関です。同機関は1989年に設立され、産業界、特に量産指向の中小企業(SME)向けにサポートを提供しています。