KITECH采用dSPACE技术(例如场景生成服务、仿真解决方案AURELION和汽车仿真模型(ASM)),成功打造了一个测试系统,该系统用于验证自动街道清扫机软件,用于未来区域路面环卫不是。KITCH团队利用现有的测量数据等生成逼真的场景。

虚拟展示真实的街道
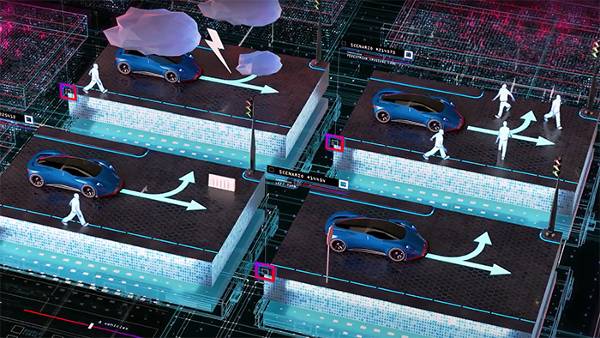
KITECH利用车辆传感器记录的测量数据,在虚拟3D环境中复原了韩国平东市的道路组成的2.3公里轨道。对于该部署区域(图1),团队生成了用于操作街道清扫机的传感器真实测试场景,然后运行。实现此类项目需要仿真和验证合作伙伴dSPACE所关注的解决方案。这意味着,dSPACE工具链可以在整个过程中提供重要支持。
囊括关乎安全的场景
该仿真的目标是验证自动街道清扫机在路上会遇到的各种日常情况及重要场景(如车辆转弯等)。该项目还重点验证了定位、规划逻辑、轨迹记录和速度控制算法。这对于关乎安全的驾驶场景中发挥作用的算法尤其重要,在真实的驾驶测试中很难验证这些算法。

从街道到仿真
要实现无人驾驶街道清扫机,在计算机生成的场景中进行驾驶测试是必不可少的。为了让场景尽量逼真,所采用的模型和数据需要尽可能精确地复制真实世界。该复制用于测试系统中的传感器仿真,因此精度至关重要,特别是使用传感器在虚拟地图上寻找路线自动驾驶汽车。

几乎可以自动创建仿真场景
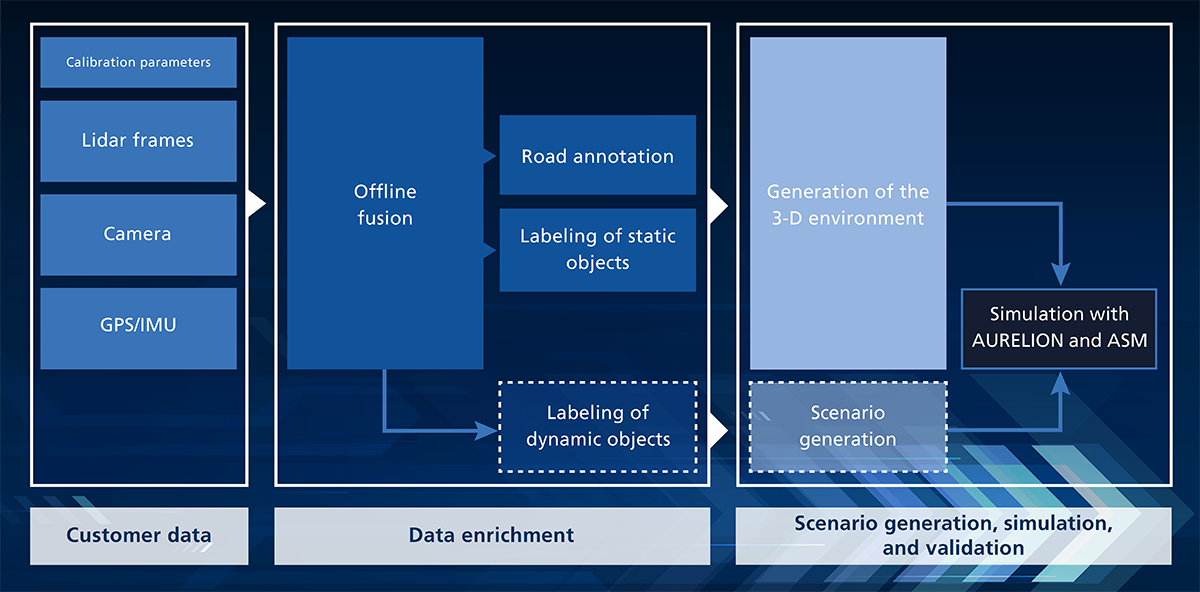
高度自动化的过程(图2)利用可用的车辆传感器数据,创建仿真所需的人为因素(仿真场景)。首先,根据时间和空间,将可用的测量数据放入全球参考系统中。第二步,使用基于人工智能的标注过程提取相关信息。由dSPACE旗下公司understand.ai的标注工具生成所需的标注。第三步,将提取到的信息转换为可仿真的场景。每个仿真都是基于精确的道路模型。该项目采用2.3公里轨道的道路模型。它包含十个十字路口和摄像头可以检测到的所有道路标志。
精细的环境模型
除了道路模型,该场景还包括一个三维环境模型,其中包含这条路线附近的所有静态对象。这包括70座建筑物、45个围栏、墙壁、交通标志、交通灯、路灯和树木。由于该环境模型要用于基于物理的激光雷达仿真,团队尽量逼真地仿真了这些对象的材质。并将其他道路使用者作为动态对象,对仿真场景进行补充。其类型、外观和行为根据简单的行为模型随机定义。从测量数据中还可以提取出交通场景,并在仿真中回放。
在虚拟环境中进行验证
此时,就可以在新创建的虚拟世界中测试不同层次的驾驶功能了。这还包括基于卷积神经网络(CNN)的车辆和交通灯检测感知算法;通过过滤体素网格和边界框检测障碍物;以及基于高清地图的轨迹规划。仿真中非常逼真地创建所有传感器(7个摄像头、4个激光雷达、4个雷达、V2X、车辆状态信息和GPS)的相关传感器数据。此时,虚拟车辆需要按照计划的轨迹行驶,并根据接收到的障碍物和环境信息调整速度。通过改变天气和交通密度等参数,可以生成任意数量的不同场景,并运行数千次。从而,在原型车在平东实际行驶之前,检测各种关键情况。
Wongun Kim博士,KITECH
《dSPACE杂志》,2022年12月出版