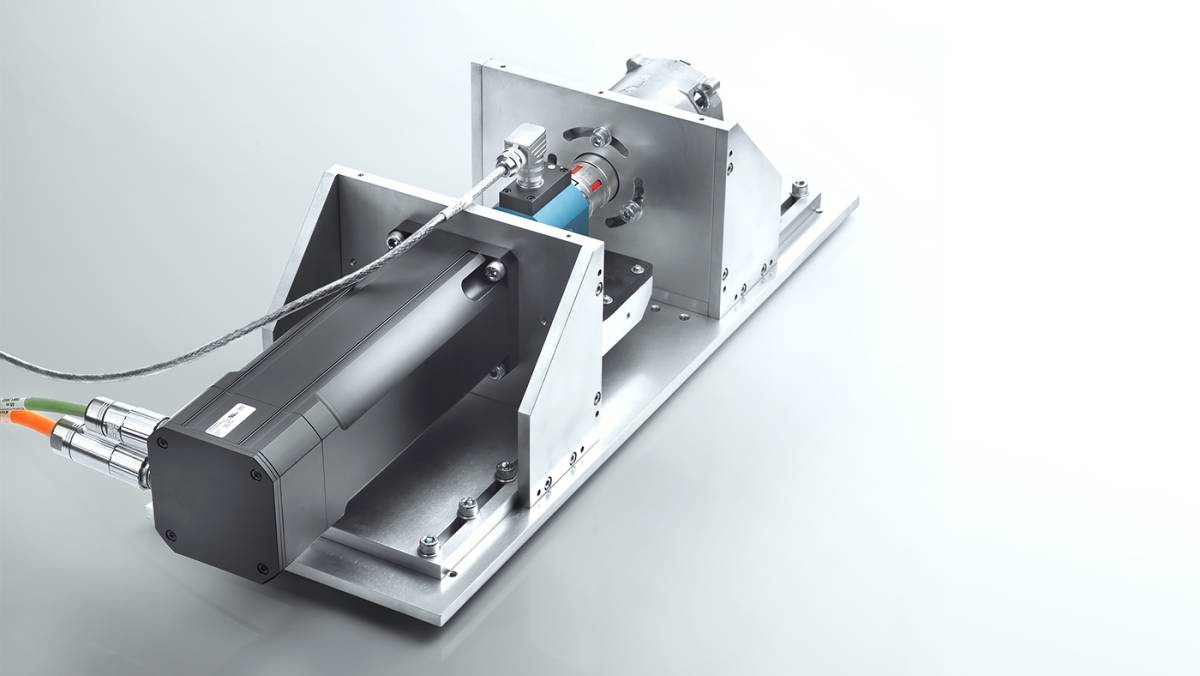
Small Steering Test Bench
The setup presented here shows how a “mini” test bench can be integrated even in the smallest spaces. The “test bench drawer” is built into a 19’’ rack and can be used for many applications that absolutely require the real drive unit to be integrated in the test system. The amount of performance data of the load machines is manageable and allows for extensive mechanical tests. The example setup shows a load motor for an EPS servomotor. In closed-loop operation, a steering model that provides the target values for the load machine is computed on the real-time hardware. This virtualization of the mechanics increases flexibility, which is particularly useful for power packs (generic drive units).



Features:
- Steering test bench for power packs of electromechanical power steering systems
- Synchronous motor for simulating the position or the load torque acting on the drive shaft of the servomotor
- Sensor for capturing the torque of the servomotor
- Prepared for virtual test drives thanks to the seamless integration into the ASM Vehicle Dynamics Model
- Integration in a standard HIL cabinet possible
- Dimensions: 0.5 m x 0.5 m x 0.5 m (approx. 9.8 x 3.3 x 7.2 ft)
- Weight: approx. 20 kg (approx. 44 lb)
- Connected load: 8 kW
References:
- Various turn-key projects for OEMs in Europe, North America, and Asia
Load motor:
| Motor Characteristics | ||
|---|---|---|
| Motor | Synchronous motor without transmission | |
| Motor encoder | HIPERFACE® motor feedback system | |
| Servo amplifier | LTi Servo One | |
| Control strategy torque | Forward control (motor current) | |
| Control strategy position | Cascade control with subsidiary speed and torque control (no controller on dSPACE real time hardware) | |
| Maximum continuous torque [Nm] | 6 | |
| Maximum displacement [deg] | unlimited | |
| Maximum speed [rpm] | 6000 | |
| Steady State Control Accuracy | ||
|---|---|---|
| Torque [Nm] | ±0.1 (depends on device under test and torque transducer) | |
| Position [deg] | ±0.01 | |
| Torque Sensor Characteristics | ||
|---|---|---|
| Measurement range [Nm] | ±10 | |
| Accuracy [Nm] | ±0.01 | |
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.