Kleiner Lenkungsprüfstand
Der hier dargestellte Aufbau zeigt die Integration eines „Mini“-Prüfstandes in engstem Bauraum. Der in einem 19-Zoll-Schrank untergebrachte „Prüfstandsauszug“ kann für viele Anwendungen aufgebaut werden, bei denen die Integration der echten Antriebseinheit im Testsystem unabdingbar ist. Die Leistungsdaten der Lastmaschinen sind überschaubar und erlauben umfangreiche Tests auf mechanischer Ebene. Der abgebildete Beispielaufbau zeigt einen Belastungsmotor für einen EPS-Unterstützungsmotor. Für den Closed-Loop-Betrieb wird auf der Echtzeit-Hardware ein Lenkungsmodell gerechnet, das die Sollwerte für die Lastmaschine liefert. Diese Virtualisierung der Mechanik erhöht die Flexibilität, was insbesondere bei generischen Antriebseinheiten, sogenannten „Power Packs“, einen Mehrwert darstellt.
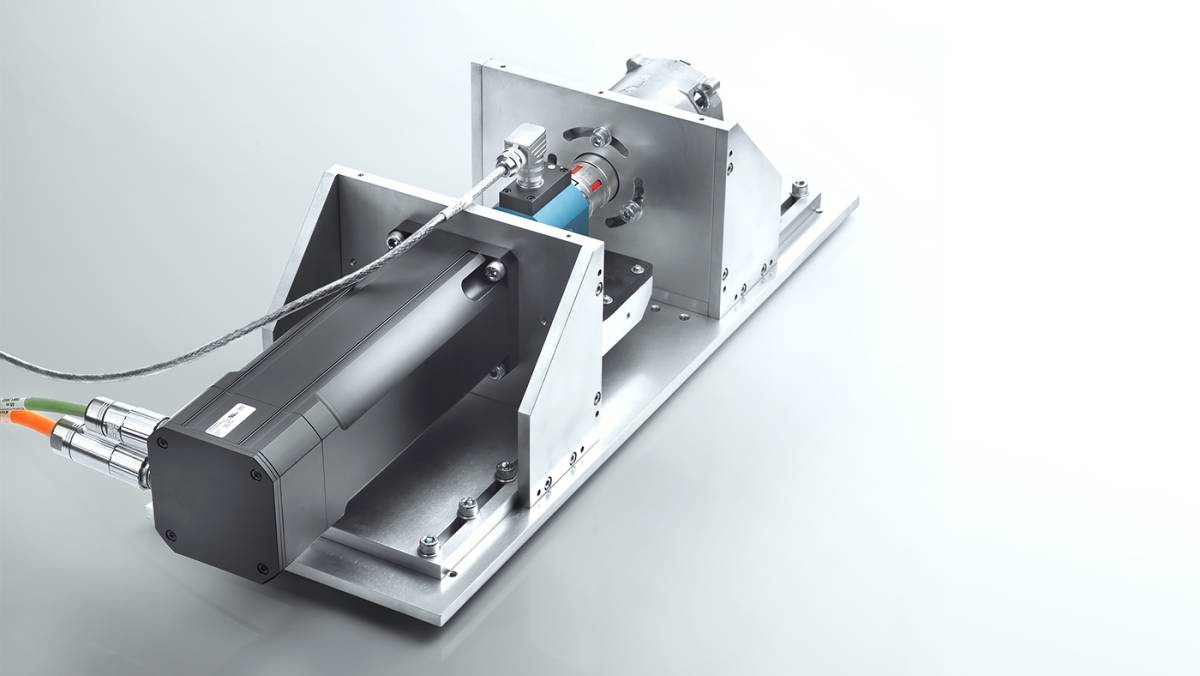



Merkmale:
- Lenkungsprüfstand für Power Packs von elektromechanischen Servolenkungen
- Synchronmotor für die Simulation der Position oder des Lastmomentes, das auf die Antriebswelle des Unterstützungsmotors wirkt
- Sensor für die Drehmomenterfassung des Unterstützungsmotors
- Vorbereitet für virtuelle Testfahrten durch nahtlose Integration in das ASM Vehicle Dynamics Model
- Integration in Standard-HIL-Simulator möglich
- Abmessungen: 0,5 m x 0,5 m x 0,5 m (L x B x H)
- Gewicht: ca. 20 kg
- Anschlussleistung: 8 kW
Referenzen:
- Mehrere schlüsselfertige Projekte für OEMs und Zulieferer in Europa, Nordamerika und Asien
Load motor:
| Motor Characteristics | ||
|---|---|---|
| Motor | Synchronous motor without transmission | |
| Motor encoder | HIPERFACE® motor feedback system | |
| Servo amplifier | LTi Servo One | |
| Control strategy torque | Forward control (motor current) | |
| Control strategy position | Cascade control with subsidiary speed and torque control (no controller on dSPACE real time hardware) | |
| Maximum continuous torque [Nm] | 6 | |
| Maximum displacement [deg] | unlimited | |
| Maximum speed [rpm] | 6000 | |
| Steady State Control Accuracy | ||
|---|---|---|
| Torque [Nm] | ±0.1 (depends on device under test and torque transducer) | |
| Position [deg] | ±0.01 | |
| Torque Sensor Characteristics | ||
|---|---|---|
| Measurement range [Nm] | ±10 | |
| Accuracy [Nm] | ±0.01 | |
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.