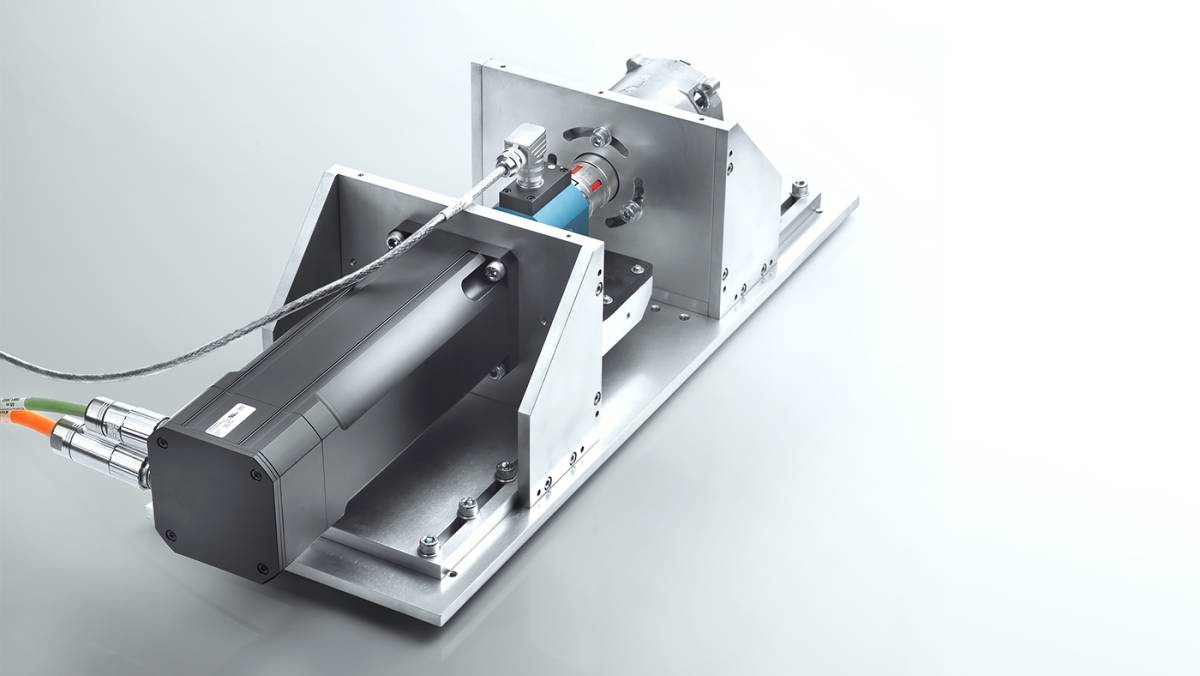
Small Steering Test Bench
The setup presented here shows how a “mini” test bench can be integrated even in the smallest spaces. The “test bench drawer” is built into a 19’’ rack and can be used for many applications that absolutely require the real drive unit to be integrated in the test system. The amount of performance data of the load machines is manageable and allows for extensive mechanical tests. The example setup shows a load motor for an EPS servomotor. In closed-loop operation, a steering model that provides the target values for the load machine is computed on the real-time hardware. This virtualization of the mechanics increases flexibility, which is particularly useful for power packs (generic drive units).



Features:
- Steering test bench for power packs of electromechanical power steering systems
- Synchronous motor for simulating the position or the load torque acting on the drive shaft of the servomotor
- Sensor for capturing the torque of the servomotor
- Prepared for virtual test drives thanks to the seamless integration into the ASM Vehicle Dynamics Model
- Integration in a standard HIL cabinet possible
- Dimensions: 0.5 m x 0.5 m x 0.5 m (approx. 9.8 x 3.3 x 7.2 ft)
- Weight: approx. 20 kg (approx. 44 lb)
- Connected load: 8 kW
References:
- Various turn-key projects for OEMs in Europe, North America, and Asia
Load motor:
| Motor Characteristics | ||
|---|---|---|
| Motor | Synchronous motor without transmission | |
| Motor encoder | HIPERFACE® motor feedback system | |
| Servo amplifier | LTi Servo One | |
| Control strategy torque | Forward control (motor current) | |
| Control strategy position | Cascade control with subsidiary speed and torque control (no controller on dSPACE real time hardware) | |
| Maximum continuous torque [Nm] | 6 | |
| Maximum displacement [deg] | unlimited | |
| Maximum speed [rpm] | 6000 | |
| Steady State Control Accuracy | ||
|---|---|---|
| Torque [Nm] | ±0.1 (depends on device under test and torque transducer) | |
| Position [deg] | ±0.01 | |
| Torque Sensor Characteristics | ||
|---|---|---|
| Measurement range [Nm] | ±10 | |
| Accuracy [Nm] | ±0.01 | |
혁신을 추진하세요. 항상 기술 개발의 동향을 주시해야 합니다.
저희 전문 지식 서비스에 가입하세요. dSPACE의 성공적인 프로젝트 사례를 확인해 보세요. 시뮬레이션 및 검증에 대한 최신 정보를 받아보세요. 지금 바로 dSPACE 다이렉트(뉴스레터)를 구독하세요.