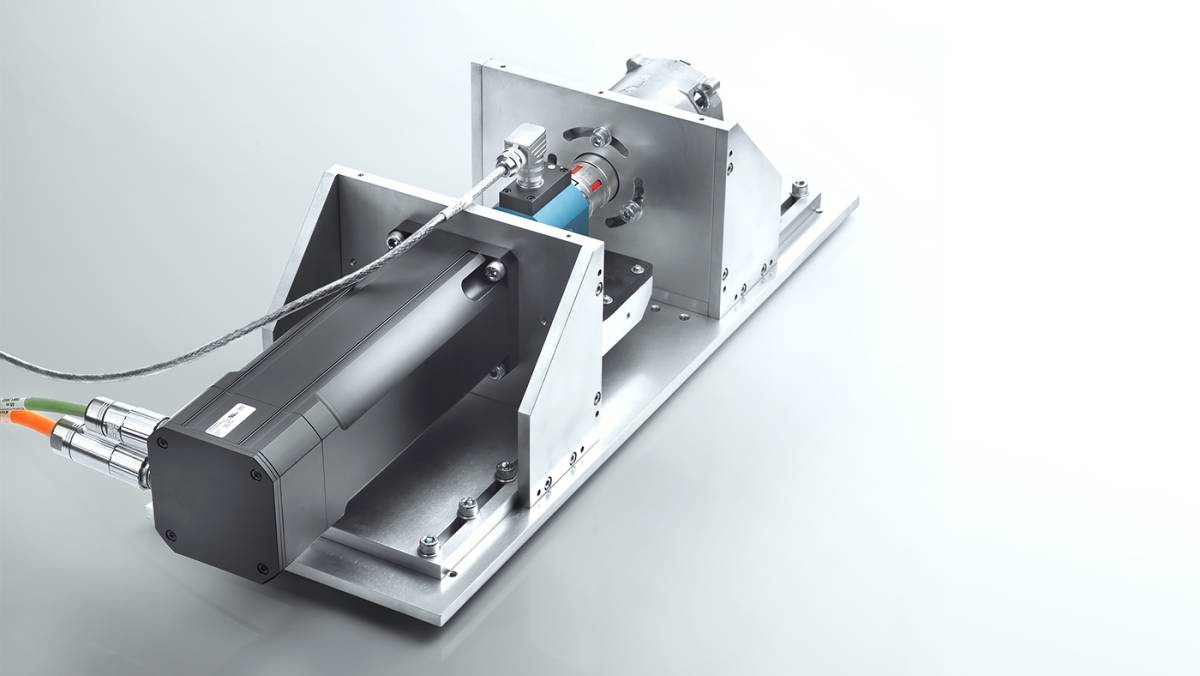
小型のステアリングテストベンチ
ここで紹介するシステムは、「小型」テストベンチがいかに小さなスペースにも統合できるかを示すものです。19インチのラックに組み込まれた「テストベンチドロワー」は、テストシステムへの実際の駆動ユニットの統合が不可欠な多くの用途に使用することができます。負荷装置の性能データの量は管理可能で、広範な機械的テストが行えます。セットアップ例では、EPSサーボモーター用の負荷モーターが示されています。閉ループ動作では、負荷装置に目的の値を提供するステアリングモデルがリアルタイムハードウェア上で計算されます。この機械構造の仮想化により柔軟性が向上し、バッテリパック(一般的な駆動ユニット)に特に役立ちます。



特徴:
- 電気機械式パワーステアリングシステムのバッテリーパック向けステアリングテストベンチ
- 同期モーターにより、サーボモーターの位置やドライブシャフトに作用する負荷トルクをシミュレート可能
- センサによってサーボモーターのトルクを取得
- ASM Vehicle Dynamics Modelへのシームレスな統合により、仮想テストドライブに対応
- 標準的なHILキャビネットに統合可能
- サイズ:0.5 m x 0.5 m x 0.5 m(約9.8 x 3.3 x 7.2フィート)
- 約20 kg(約44 lb)
- 接続負荷:8 kW
参照:
- 欧州、北米、アジアのOEM向けのさまざまなターンキープロジェクトが存在
負荷モーター:
| モーターの特性 | ||
|---|---|---|
| モーター | トランスミッション非搭載の同期モーター | |
| モーターエンコーダ | HIPERFACE®モーターフィードバックシステム | |
| サーボアンプ | LTi Servo One | |
| トルク制御ストラテジ | フォワード制御(モーター電流) | |
| 位置制御ストラテジ | 速度およびトルクを補助的に制御するカスケード制御(dSPACEリアルタイムハードウェア上のコントローラはなし) | |
| 最大連続トルク[Nm] | 6 | |
| 最大変位[deg] | 制限なし | |
| 最大回転速度[rpm] | 6000 | |
| 定常状態の制御精度 | ||
|---|---|---|
| トルク[Nm] | ±0.1(テスト対象デバイスおよびトルクトランスデューサによる) | |
| 位置[deg] | ±0.01 | |
| トルクセンサの特性 | ||
|---|---|---|
| 計測範囲[Nm] | ±10 | |
| 精度[Nm] | ±0.01 | |
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き