Simulation modeling involves creating a digital twin of a physical system to predict its behavior in the real world. This helps designers and engineers understand early on whether components and systems, including their control units, will meet their specifications. Accurate modeling of digital twins is critical for the reliable validation of control algorithms and control devices via simulation.
Our Solution Highlights
- Validated, ready-to-use model libraries for a broad range of mobility applications
- Support for various platforms, from the cloud to dedicated high-performance computing units (FPGA and GPU)
- Seamless transition between SIL, HIL, and emulation
- Open models for easy customizability
- Parameterization possible at run time
- From component tests to domain validation and system tests with complete vehicle simulation
Application Areas of Modeling and Simulation
Profit from a wide range of validated simulation models that can be used, for example, to fully represent and validate an electrified, autonomous vehicle including its perception sensors. In addition, our models are also suitable for use in other areas, such as aviation and energy supply. They support all development stages, from function design to ECU testing. These include software-in-the-loop (SIL) simulations, which can be performed at any speed, and hardware-in-the-loop (HIL) simulations, which exactly match the timing behavior of the simulated system. Emulation of physical variables on the power level is also supported.


Certified According to ISO 26262
The dSPACE simulation tool suite consisting of ASM, AURELION, and ModelDesk was certified by TÜV SÜD according to ISO 26262 for safety-relevant systems in motor vehicles. Our simulation, parameterization, and visualization tools are thus suitable to be used in safety-related development projects according to ISO 26262:2018 for any automotive safety integrity level (ASIL).
This means: Vehicle manufacturers and suppliers can exclude the tools from the ISO 26262 qualification of their entire processes and can concentrate on proving the functional safety of their own process chains.
Be on the Safe Side with Certified Simulation Tools
Watch this video series to see how certified dSPACE simulation tools help you create a safe and reproducible simulated environment.
Coordinated Range of Solutions
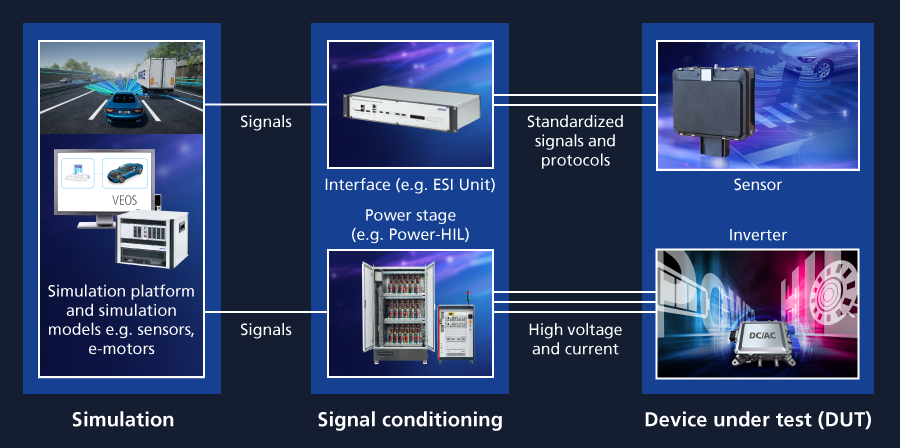
Benefit from solutions consisting of software (models) and hardware (interfaces, signal conditioning) that interact perfectly. The smooth combination of hardware and software makes for particularly powerful solutions:
- Sensor technology: Convert simulated sensor data into electrical signals and feed it into the real sensors. Include individual processing stages of the device under test (DUT) in the test. To ensure continuity between HIL and SIL simulations, these special interfaces are also available virtually.
- Electric drives: Generate real currents and voltages from simulations with power stages to emulate electrical loads and e-motors, or to test inverters with power HILs.
Supported Simulation Platforms
Depending on the simulation task, certain processor technologies offer advantages in model calculation. While central processing units (CPU) are suitable for the majority of simulations, graphics processing units (GPU) particularly support sensor simulations, and field-programmable gate arrays (FPGA) play to their strengths in the context of highly dynamic, electric machines. The portfolio therefore comprises coordinated models and simulation platforms that can be combined as required. All simulation tasks can also be performed in parallel in the cloud. The SIMPHERA framework orchestrates and analyzes these simulations and accesses relevant models.