It’s half time in the renowned Verification Validation Methods (VVM) project: In mid-March, the project partners presented their initial results and methods. Representatives from politics, industry, and academia stressed the importance of the project, stating that autonomous driving can be safe only if reliable validation and verification methods are used. dSPACE contributes its expertise in SIL and HIL simulation for the analysis and evaluation of project requirements, and also provides prototype implementations to demonstrate the methods.
Results of three main areas were presented in the half-time presentation: The requirements for the test methods, orchestration and validation of the test infrastructures, and the data flow as well as the tools used in the project. dSPACE successfully tested the methods developed in the project for practicality with two demonstrations on criticality analysis and sensor model validation, among other things.
Criticality Analysis
Due to the virtually unlimited number of different road traffic situations, moving real tests to simulation alone is not enough to be able to handle the sheer infinite number of test kilometers. A central task for limiting the parameter range to the relevant cases is the criticality analysis. By systematically identifying causalities that lead to critical situations on the road (called criticality phenomena), the test scope is reduced to the relevant test cases and thus to a manageable level. The highly scalable scenario-based testing plays a particularly important role. While accident databases and expert knowledge formed the basis for the project, simulation was used very early on to effectively complement real data and specifically generate evidence for the refinement of the criticality phenomena. A causality graph shows the factors that influence the criticality phenomenon and their relationships between each other, allowing for their analysis before they are deliberately varied and observed in the simulation. A demonstration that analyzed the particularly easy-to-observe criticality phenomenon “reduced friction value” was implemented in dSPACE SIMPHERA by means of a use case that was defined in one way and used throughout the project. The KPI-based evaluation makes it easy to filter for critical simulation runs and analyze them a second time – this time in more detail.
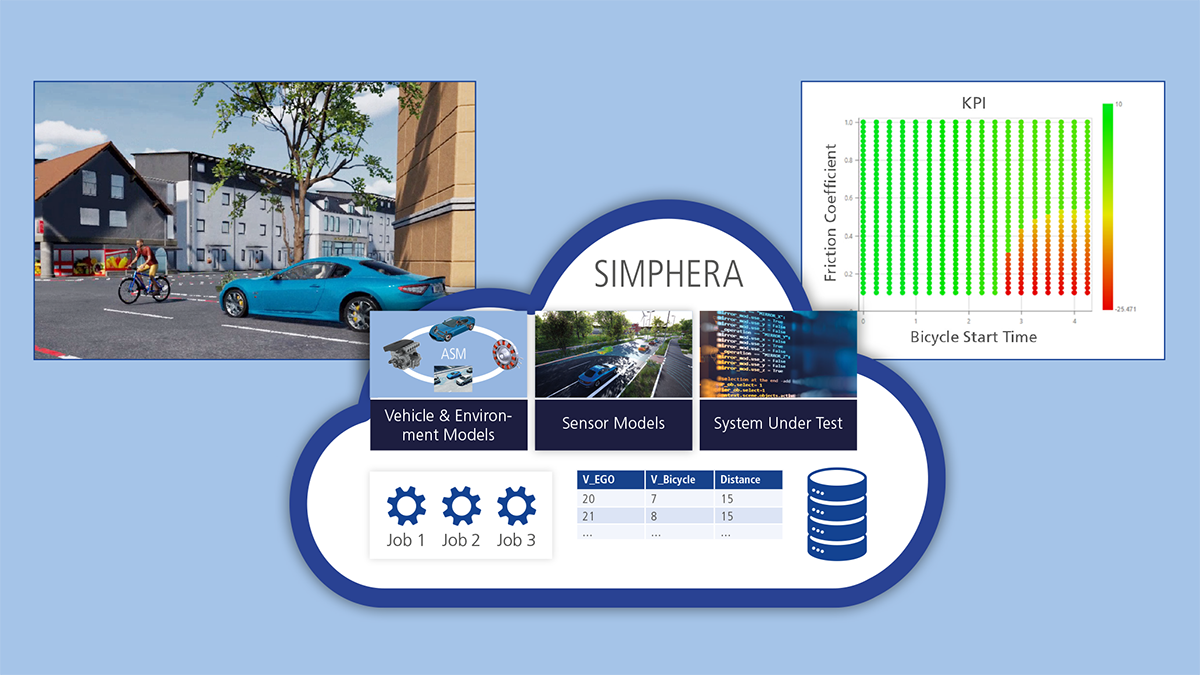
A demonstration to investigate the criticality phenomenon “reduced friction value” was implemented using SIMPHERA based on a defined use case.
Sensor Model Validation
To systematically move tests from reality to simulation, their limits of application must be known to build trust in the models used. For this, the simulation and all used models first have to be validated for the use case and for different samples from the possible parameter set. The method that was designed in the first project half was demonstrated using the model specification of the lidar sensor simulation, based on the general simulation requirements. For this, the chain of effects in the sensor system was methodically prepared and tested for relevance. From this, the project team derived requirements for the lidar system simulation and implemented them in the dSPACE tool chain. For the subsequent demonstration, a lidar sensor model provided by the SET Level project was integrated into the dSPACE sensor environment simulation with its powerful ray tracing engine via open interfaces. A particular focus was on validated material parameters of the virtual environment, which simulate the optical reflection behavior of objects with a high degree of realism. This is what makes model validation based on echo pulse width at the point cloud level possible. The second half of the project will now focus on refining the demonstrated results and implementing more concept demonstrators. While the criticality analysis and sensor model validation will remain as important as before, test orchestration, i.e., the distribution of test cases to the most suitable test equipment, and the required continuity of the test infrastructure between SIL and HIL will be another focal point of dSPACE’s efforts in the project.
VVM
The goal of the VVM project is to develop test methods and provide systems and methods for proving that automated vehicles are safe. The project is currently working on the use case of an urban intersection and is focusing on driving functions up to the complete automation of vehicles (SAE Levels 4 and 5). In the project, proof of safety is to be integrated as an integral part in the development process. Testability, verification and validation is considered a design goal even for the development of components and subsystems (“design for testability”). The emerging systems can then be tested hierarchically so that the entire system does not have to be tested again when individual components are updated. dSPACE is one of 23 project partners. The project will run until mid-2023.
dSPACE MAGAZINE, PUBLISHED NOVEMBER 2022
