Halbzeit beim viel beachteten Verification-Validation-Methods (VVM)-Projekt: Mitte März präsentierten die Projektpartner erste Ergebnisse und Methoden. Die Relevanz des Projekts sei hoch, betonten Vertreter aus Politik, Industrie und Forschung, denn sicheres autonomes Fahren werde nur dann möglich, wenn verlässliche Validierungs- und Verifikationsmethoden eingesetzt werden. dSPACE bringt in das Projekt neben umfangreicher Expertise in der SIL- und HIL-Simulation zur Analyse und Bewertung der Projektanforderungen prototypische Umsetzungen zur Demonstration der Methoden ein.
Bei der Halbzeitpräsentation wurden Ergebnisse aus drei wesentlichen Bereichen vorgestellt: Die Anforderungen an die Testmethoden, die Orchestrierung und Validierung der Testinfrastrukturen und der Datenfluss sowie die im Projekt eingesetzten Toolings. dSPACE hat, unter anderem mit zwei Demonstrationen zur Kritikalitätsanalyse und Sensormodellvalidierung, die im Projekt erarbeiteten Methoden erfolgreich auf ihre Praxistauglichkeit hin untersucht.
Kritikalitätsanalyse
Aufgrund der nahezu unendlich vielen verschiedenen Situationen im Straßenverkehr ist eine Verlagerung der Realtests in die Simulation allein nicht ausreichend, um die schier unendliche Menge an Testkilometern handhabbar zu machen. Eine zentrale Aufgabe zur Eingrenzung des Parameterraums auf die relevanten Fälle übernimmt dabei die Kritikalitätsanalyse. Durch systematisches Identifizieren von Wirkzusammenhängen, die zu kritischen Situationen im Straßenverkehr führen (sog. Kritikalitätsphänomene), wird der Testraum auf die relevanten Testfälle und damit auf ein beherrschbares Maß reduziert. Dem hoch skalierbaren szenariobasierten Testen kommt dabei eine besondere Rolle zu.
Während Unfalldatenbanken und Expertenwissen den Ausgangspunkt im Projekt bildeten, wurde die Simulation schon frühzeitig dazu genutzt, um Realdaten effektiv zu ergänzen und somit zielgerichtet Evidenz zur Verfeinerung der Kritikalitätsphänomene zu generieren. Durch einen Kausalitätsgraphen werden die Einflussgrößen auf das Kritikalitätsphänomen und ihre Beziehungen untereinander vorab analysiert, so dass sie in der Simulation gezielt variiert und überwacht werden können. Eine Demonstration zur Untersuchung des besonders anschaulichen Kritikalitätsphänomens „verminderter Reibwert“ wurde dazu anhand eines im Projekt einheitlich definierten Use Cases in dSPACE SIMPHERA implementiert (Abbildung). Durch die KPI-basierte Auswertung lassen sich kritische Simulationsläufe einfach herausfiltern und einer zweiten, detaillierten Analyse unterziehen.
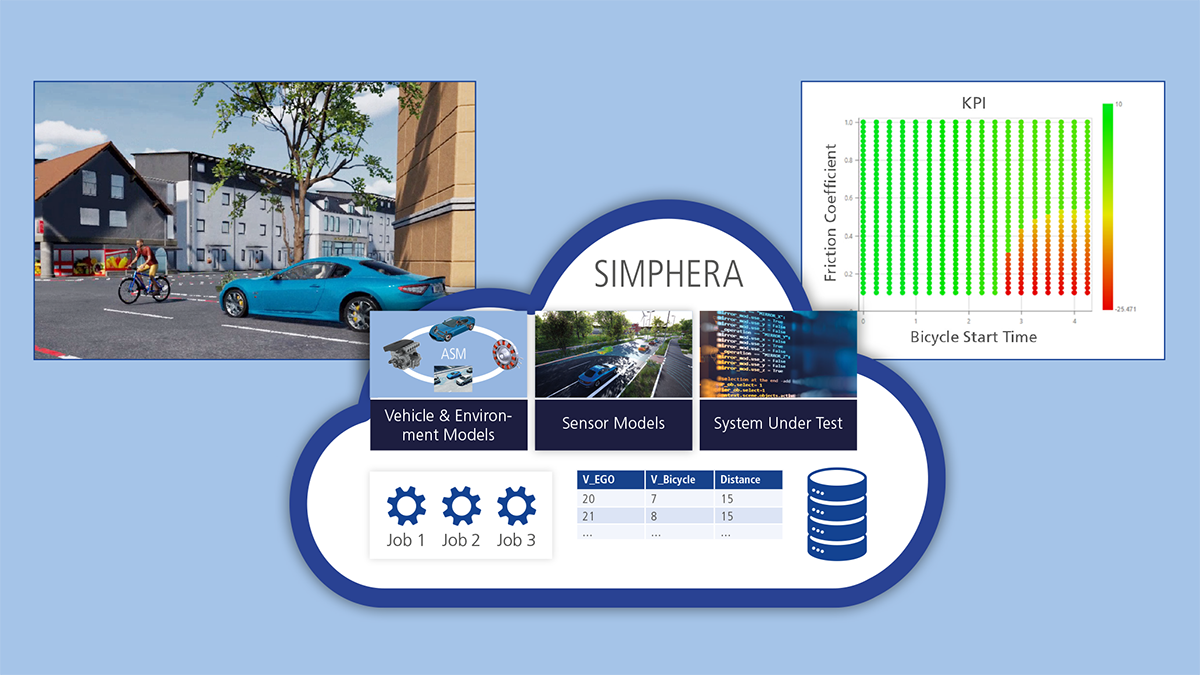
Eine Demonstration zur Untersuchung des anschaulichen Kritikalitätsphänomens „verminderter Reibwert“ wurde anhand eines einheitlich definierten Use Cases mit SIMPHERA implementiert.
Sensormodellvalidierung
Um Tests systematisch von der Realität in die Simulation verlagern zu können, müssen deren Einsatzgrenzen bekannt sein, um Vertrauen in die verwendeten Modelle zu schaffen. Dazu müssen die Simulation und alle benutzten Modelle zuvor für den Anwendungszweck für verschiedene Stichproben aus dem möglichen Parameterraum validiert werden.
Die Demonstration der in der ersten Projekthälfte erarbeiteten Methoden wurde, ausgehend von den generellen Simulationsanforderungen, für die Modellspezifikation der Lidar-Sensorsimulation durchgeführt. Hierfür wurden die Wirkketten im Sensorsystem methodisch aufbereitet und anschließend auf ihre Relevanz hin überprüft. Hieraus wurden Anforderungen an die Lidar-Systemsimulation abgeleitet und in der dSPACE Toolkette implementiert. Für die anschließende Demonstration wurde ein aus dem Projekt SET Level bereitgestelltes Lidar-Sensormodell über offene Schnittstellen in die dSPACE Sensor Environment Simulation mit ihrer leistungsstarken Raytracing Engine integriert. Ein besonderes Augenmerk wurde dabei auf validierte Materialparameter der virtuellen Umgebung gelegt, die das optische Streuverhalten der Objekte realitätsgetreu abbilden. Erst dadurch wird eine Modellvalidierung basierend auf der Echo Pulse Width auf Punktwolkenebene ermöglicht.
In der zweiten Halbzeit des Projekts geht es nun darum, die gezeigten Arbeiten zu verfeinern und weitere Konzeptdemonstratoren zu realisieren. Während Kritikalitätsanalyse und Sensormodellvalidierung unverändert relevant bleiben, wird die Testorchestrierung, d. h. die Verteilung von Testfällen auf das jeweils am besten geeignete Testmittel und die dafür erforderliche Durchgängigkeit der Testinfrastruktur zwischen SIL und HIL, einen weiteren Schwerpunkt der Arbeiten von dSPACE bilden.
VVM
Das Projekt VVM hat zum Ziel, Testverfahren zu entwickeln und Systematiken sowie Methoden bereitzustellen, um den Sicherheitsnachweis für automatisierte Fahrzeuge zu führen. Das Projekt arbeitet am Use Case der urbanen Kreuzung und fokussiert sich auf Fahrfunktionen bis zur kompletten Automatisierung von Fahrzeugen (SAE Level 4 und 5). Im Projekt soll der Sicherheitsnachweis als integraler Bestandteil im Entwicklungsprozess integriert werden. Bereits in der Entwicklung von Komponenten und Subsystemen wird die Testbarkeit, die Verifikation und Validierung als Designziel betrachtet („Design für Testbarkeit“). Die entstehenden Systeme lassen sich dann hierarchisch testen, so dass bei Aktualisierungen von Komponenten nicht mehr das gesamte System neu getestet werden muss. dSPACE ist einer von 23 Projektpartnern. Das Projekt läuft bis Mitte 2023.
dSPACE MAGAZINE, PUBLISHED NOVEMBER 2022
