有名なVVM(Verification Validation Methods:検証および妥当性確認手法)プロジェクトも中盤に差し掛かり、3月中旬にはプロジェクトパートナー各社がそれぞれの初期成果や手法を発表しました。行政、産業、学術機関など各界の代表者が本プロジェクトの重要性を強調し、自動運転は、信頼性の高い妥当性確認および検証手法が用いられてはじめて、安全性が確保されると明言しています。dSPACEは、プロジェクト要件の分析や評価のために、SILおよびHILシミュレーションの専門知識を進呈し、また、各手法をデモンストレーションするためのプロトタイプ実装も行っています。
中間発表では、3つの主要分野の結果としてテスト手法の要件、テストインフラストラクチャのオーケストレーションと妥当性確認の要件、およびデータフローとプロジェクトで使用するツールの要件が示されました。dSPACEは、特に致命度解析とセンサモデルの妥当性確認に関する2つのデモを通じて、同プロジェクトで開発された手法の実用性をテストすることに成功しています。
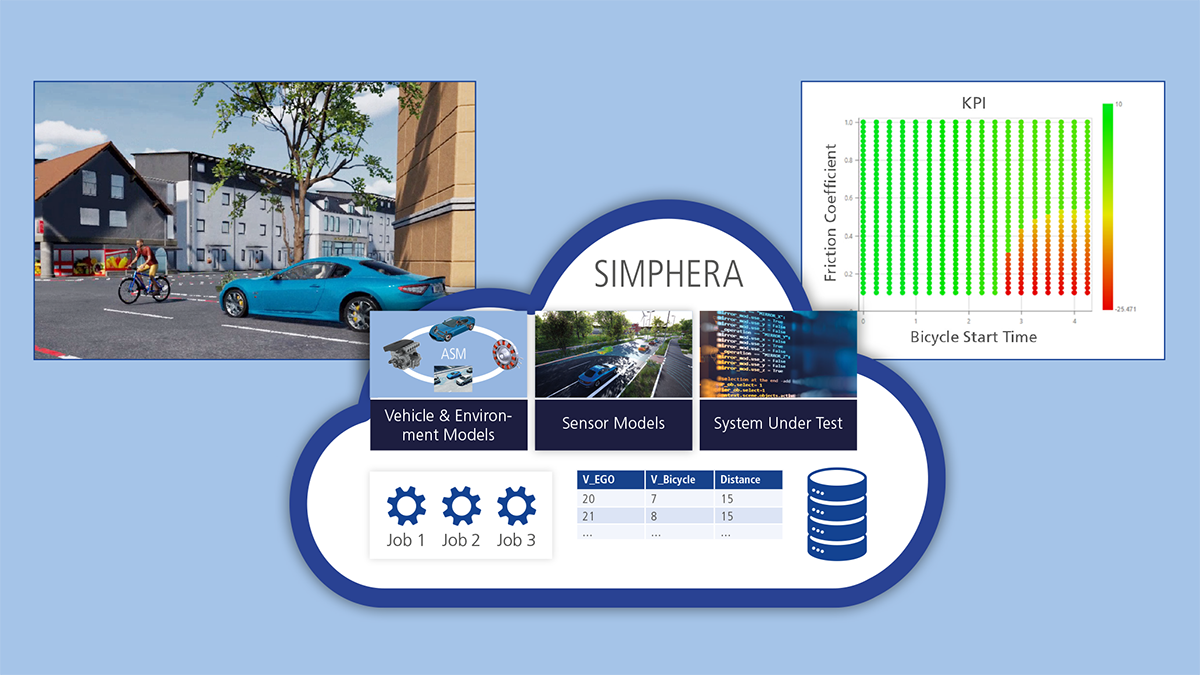
致命度解析
道路で起こり得る交通状況の数は実質、無限であるため、実際のテストをシミュレーションに移行するだけでは限りなく膨大なテスト走行距離数に対応することはできません。致命度解析とは、パラメータの範囲を関連する事例だけに限定するタスクのことです。つまり、路上において危機的状況につながる原因(つまり、致命的現象)を体系的に識別しておくことにより、テスト範囲を関連するテストケースだけに狭め、管理できる水準に保つということです。ここで特に重要な役割を果たすのが、高度にスケーラブルなシナリオベーステストです。同プロジェクトの基礎は事故データベースと専門的な知識によって形成されていますが、dSPACEではシミュレーションを非常に早期の段階で使用することにより、実際のデータを効果的に補完し、特に致命的現象を精緻に把握するための根拠を導き出しました。また、致命的現象に影響を与える各種の要因とそれらの相関性を示す因果関係グラフを分析したうえで、それを意図的に変更し、シミュレーションでその結果を確認しました。さらに、致命的現象の中でも特に容易に確認できる「摩擦値の低下」を分析したデモを単一の手法で定義し、同プロジェクトを通して利用されたユースケースに基づいてdSPACE SIMPHERA上で実行しました。KPIベースの評価により重要なシミュレーション結果が容易にフィルタリング可能になり、2回目の分析も1度目よりもさらに詳細にできるようになりました。
センサモデルの妥当性確認
テストを現実からシミュレーション環境へとシステマチックに移行させるには、使用するモデルにおいて信頼性を高めるために、アプリケーションの限界が理解されている必要があります。そのためには、まずシミュレーション自体や使用するすべてのモデルの妥当性が確認されなければなりません。ユースケースやパラメータセットから得られるさまざまなサンプルに対して検証していくのです。dSPACEでは、同プロジェクトの前半に設計された手法を、一般的なシミュレーション要件に基づき、LiDARセンサシミュレーションのモデル仕様を用いて検証しました。そのため、まずはセンサシステムの作用連鎖を入念に下調べし、関連性をテストしたうえで、そこからLiDARシステムのシミュレーション要件を導き出し、dSPACEのツールチェーンに実装しました。そして続くデモとして、強力なレイトレーシングエンジンを搭載するdSPACEセンサ環境シミュレーションに、SET Levelプロジェクトが提供したLiDARセンサモデルをオープンインターフェース経由で統合しました。この際とりわけ重視されたのは、仮想環境向けの素材パラメータの検証でした。これは物体の光反射の動きを、高い写実性をもってシミュレートするものです。これを適切に行うことができれば、エコーのパルス幅に基づいてポイントクラウドレベルでモデルの妥当性を確認できるようになります。同プロジェクトの後半では、得られた結果を改善し、より多くのコンセプトデモモデルを実装することに重点を置くことになります。dSPACEにとっては、致命度解析やセンサモデルの妥当性確認がこれまで同様に重要である一方、テストオーケストレーション、つまり、テストケースを最適なテスト機器に分散し、SILおよびHIL間で必要なテストインフラストラクチャの連続性を維持することも、また別の取り組みの焦点となりそうです。
VVM
VVMプロジェクトのゴールは、テストの方法を開発し、自動運転車両は安全であると証明するためのシステムや手法を提供することです。同プロジェクトは現在、市街地の交差点に関するユースケースに取り組んでおり、車両の完全自動運転(SAEレベル4および5)に相当する運転機能を目指しています。このプロジェクトでは、安全性の証明が開発プロセスの不可欠な要素として組み込まれる予定です。コンポーネントやサブシステムの開発の場合でさえ、設計時に目標とされるのは、テストの可用性や検証および妥当性確認の手法です(「テストを容易にする設計」)。この新しく生まれようとしているシステムは、テストが階層的に行われるため、個々のコンポーネントが更新された際にもシステム全体を改めて再テストする必要のない設計になっています。dSPACEは、23のプロジェクトパートナーのうちの1社であり、プロジェクトは2023年半ばまで実施されます。
dSPACE MAGAZINE、2022年11月発行
