知名的确认验证方法(VVM)项目进行了一半:在3月中旬,项目伙伴介绍了初步成果和方法。政界、产业界和学术界代表纷纷强调该项目的重要性,并表示,使用可靠的验证方法,才能确保自动驾驶的安全性。dSPACE依托自身在SIL和HIL仿真方面的专业实力,对项目要求进行充分的分析及评估,并提供原型从而实现方法验证。
这场项目中期展示会介绍了三大领域的成果:测试方法的要求、测试基础设施的编排和验证、数据流以及项目中使用的工具。dSPACE成功测试了该项目所开发的方法的实用性,对危害性分析和传感器模型验证等进行了两次演示。
危害性分析
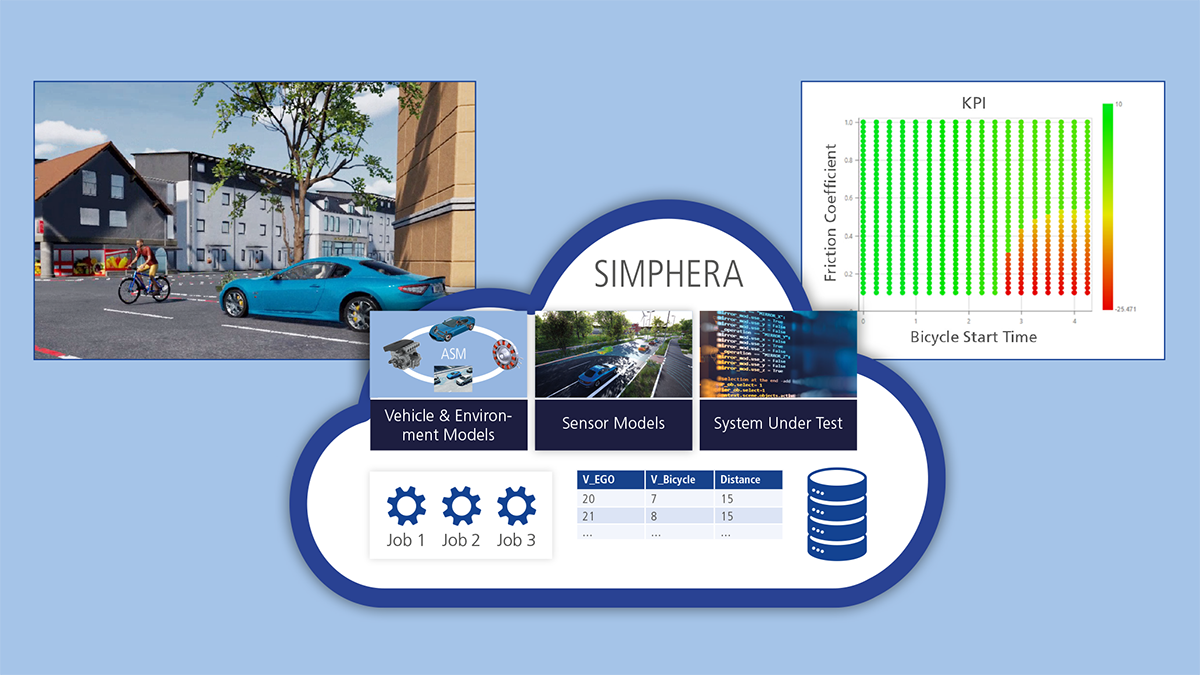
道路交通状况各式各样,只把真实测试转变为仿真,不足以应对无尽的测试里程。为限制相关情况的参数范围,中心任务是危害性分析。项目系统地识别了导致危险路况的因果关系(即危害性现象),将测试范围缩小到相关测试用例,从而将危害降低到可以应付的程度。基于场景的高度可扩展测试尤为重要。虽然事故数据库和专业知识为项目奠定了基础,项目很早就利用仿真有效补充真实数据,专门为改进危害性现象生成了证据。因果关系图显示了影响危害性现象的因素及它们相互之间的关系,先进行分析,再在模拟中有意地改变和观察它们。dSPACE SIMPHERA用一种方法定义了一个用例,整个项目都使用这个用例,由此实现了一项演示。该演示分析了一个特别容易观察到的危害性现象“摩擦系数减小”。KPI评估很容易筛选危急情况仿真,然后再次分析,这次分析会更加详细。
传感器模型验证
为了系统地将现场测试转变为仿真,必须了解它们的应用限制,才能信赖所使用的模型。首先需要针对该用例和可能参数集的不同样本,验证仿真和所使用的全部模型。会上演示了前半期项目中设计的方法。该方法根据一般仿真要求,采用了激光雷达传感器仿真的模型定式。团队在传感器系统中系统地准备效应链,并进行相关性测试。项目团队由此了解了激光雷达系统仿真的要求,并在dSPACE工具链中实现了这些要求。为进行后续的演示,团队通过开放接口,利用强大的光线跟踪引擎,将SET Level项目提供的激光雷达传感器模型集成到了dSPACE传感器环境仿真中。重点在于经过验证的虚拟环境材料参数,这些参数非常真实地仿真了对象的光学反射行为。这正是基于点云水平回波脉冲宽度的模型验证的基础。后半期项目注重改进演示结果、实现更多的概念演示。危害性分析和传感器模型仿真仍然跟以前一样重要,dSPACE在该项目中还有一个重点,那就是测试编排,即将测试用例分配给最合适的测试设备,以及SIL和HIL之间的测试基础设施需要具备的连续性。
VVM
VVM项目的目标是开发测试方法、提供各种系统和方法,证明自动驾驶汽车的安全性。目前,该项目正在研究城市十字路口的用例,重点是全自动车辆(SAE 4级和5级)的驾驶功能。在该项目中,安全性证明是开发过程不可分割的一部分。可测试性、验证也是组件和子系统开发的设计目标(“可测试性设计”)。这样就可以对新出现的系统进行分层测试,单个组件更新时,不必再次测试整个系统。本项目有23个合作伙伴,dSPACE是其中之一。该项目将持续到2023年年中。
