dSPACE Rapid-Prototyping-Systeme sind Systeme, die Funktionsentwicklern weltweit helfen, Ideen in einer realen Umgebung, mit echten Sensoren und Aktoren und in Echtzeit zu realisieren und dabei Entwicklungsaufwand und Kosten drastisch reduzieren. Ein skalierbares und flexibles Portfolio an Hardware und Software unterstützt die meisten automobilen Schnittstellen, darunter Bus- und Netzwerkstandards, Sensorschnittstellen und weitere Erweiterungsoptionen wie FPGAs oder GPUs für ADAS/AD-, Motor- oder Elektromobilitätsanwendungen.
Vorteile
- End-to-End-Werkzeugkette für Rapid Control Prototyping (RCP) und datengetriebene Entwicklung
- Test und Validierung neuer Funktionalitäten in realen Umgebungen mit realen Sensoren und Aktoren
- Leistungsstarke, zukunftssichere Lösungen vom Prototyping über Seriensteuergeräte bis hin zu kompakten oder modularen Systemen, die an wechselnde Projektanforderungen angepasst werden können.
- Gebrauchsfertige I/O-Schnittstellen sowie Bus- und Netzwerkschnittstellen mit breiter Funktionalität ohne manuelle Programmierung.
- Unterstützung von Hardware-Beschleunigern wie GPUs oder FPGAs zur Ausführung von Funktionen der künstlichen Intelligenz (KI), zum Beispiel für die Perzeption oder Sensorfusion, oder zur Ausführung schneller Steuerungsalgorithmen im µs-Bereich.
- Spezielle Mechanismen zur Überwachung der funktionalen Sicherheit, die echte Testfahrten ermöglichen

Lösungsangebot im Überblick
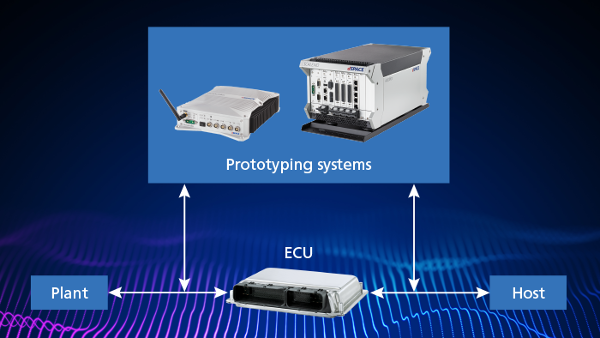
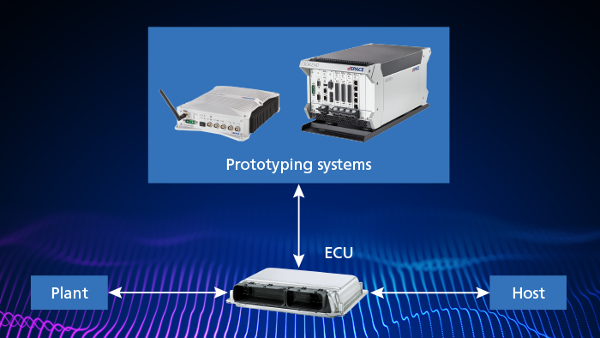
dSPACE Rapid-Prototyping-Systeme greifen die Anforderungen der mechatronischen Reglerentwicklung sowie der datengetriebenen Entwicklung in allen automobilen Domänen und in anderen Branchen auf, zum Beispiel Luft- und Raumfahrt oder Robotik. Mit unseren Prototyping-Systemen können Sie Ihre neuen Funktionalitäten in realen Umgebungen testen und sie vor Ort verbessern und kalibrieren.
Wählen Sie ein dSPACE System, das zu Ihren Anforderungen passt, von Steuergeräte-Schnittstellen, die On-Target-Prototyping auf Seriensteuergeräten ermöglichen, über kompakte Systeme wie MicroAutoBox oder MicroLabBox bis hin zu modularen High-End-Systemen wie SCALEXIO oder AUTERA. Zur Konfiguration der Systeme können Sie die dSPACE Software-Werkzeuge ConfigurationDesk, ControlDesk und den Bus Manager in Kombination mit gängigen Werkzeugen wie MATLAB®/Simulink® von MathWorks, FMI-basierten Modellen oder Linux-basierten Frameworks wie RTMaps oder dem Robot Operating System (ROS) verwenden.