先进的驾驶辅助系统(ADAS)和自动驾驶车辆(AV)的发展正大量推动创新,特别是在软件领域。然而,这些系统需要大量的测试来确保安全性,该测试必须在开发过程早期大量应用,并在尽量贴近现实的仿真环境(虚拟世界)中进行。
在虚拟世界中,ADAS和AV功能的测试依赖两个关键元素——基于物理的高性能3D仿真平台和基于计算机的仿真模型。
仿真平台必须足够强大,能够实时计算来自多个传感器的大数据融合流,而仿真模型必须能生成逼真的行为,确保仿真结果精确。平台和模型都应该是开放式的,以便适应各个项目和要求。它们还应当尽量保真,尽可能真实。
有了这两个组件,就可以将模型插入仿真中,实时观察逼真的车辆行为仿真。

dSPACE汽车仿真模型(ASM) – 即用型虚拟测试仿真模型
使用 dSPACE 汽车仿真模型 (ASM),虚拟测试快捷又便利。从模型在环(MIL)到软件在环(SIL),再到硬件在环(HIL)、云计算,这些现成的即用型仿真模型可以实时、更快地实现真实的车辆行为和交通仿真。ASM采用开放式模块化结构,可以根据具体应用案例快速、精确调整。有了ASM,开发人员可以快速进行各种应用程序的开发和验证任务。( 应用案例 :仿真自动驾驶的众多场景。)
NVIDIA DRIVE Sim由Omniverse提供支持——真实的3D环境、精确的传感器仿真
NVIDIA DRIVE Sim 是一个可扩展、精确的开放式仿真平台,基于提供核心仿真和渲染引擎的 NVIDIA Omniverse 。DRIVE Sim可仿真模拟大量应用案例,包括感知训练、规划和控制仿真,乃至全面的AV模块验证。DRIVE Sim可以在本地工作站上运行,也可以扩展到数据中心或云端节点的多个GPU。它支持SIL或HIL配置。对于大规模的HIL测试,可以在 NVIDIA DRIVE Constellation 上部署DRIVE Sim。
dSPACE和NVIDIA——完整的工具链
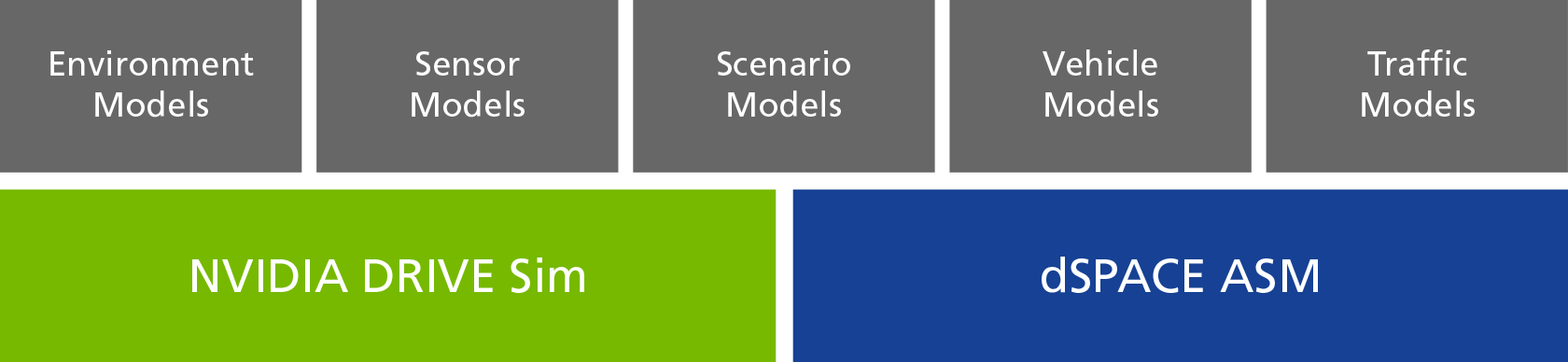
dSPACE和NVIDIA将dSPACE ASM与NVIDIA DRIVE Sim相结合,针对ADAS/AV系统测试推出了一个全方位的工具链。该工具链由各种不同的仿真模型组成,很容易参数化、执行速度快,可以在各种硬件平台和软件仿真解决方案上运行。为应对仿真的各个方面,dSPACE-NVIDIA工具链由下列模型组成:
- 环境模型 – 重新创建车辆周围的3D视图
- 传感器模型 (即雷达、激光雷达、摄像头、超声波、IMU、GNSS) – 评估车辆如何感知周围环境
- 车辆模型 (又称车辆动力学模型)– 仿真各个组件(如紧急制动器)、子系统(如动力传动系统)和/或整个虚拟车辆,观察行驶中的车辆
- 交通模型 – 仿真真实的交通状况,包括周围的车辆和其他道路使用者(如行人)
- 场景模型 – 生成各种各样的真实场景,用于测试自动驾驶功能
这些模型来自dSPACE、NVIDIA或生态系统合作伙伴。
dSPACE-NVIDIA仿真解决方案为测试自动驾驶系统带来了更深入的见解。例如,车辆模型集成到测试环中时,可以使用俯仰角、横摇角和偏航角创建所安装的传感器的真实运动,验证环境感知传感器的视野。也可以考虑AV控制器与车辆的运动控制接口,更好地了解AV算法对动力传动系统、制动系统和转向系统的影响。
此外,可以在虚拟世界中测试整个AV软件栈。开发人员可以根据需要,创建任意数量的挑战性场景来评估系统,确定有待改进之处。很容易复制场景进行小幅调整,重新评估相同场景的变化形式(例如增加迎面而来的车辆、改变交通目标、改变速度,等等)。仿真可以回放、修改、重放和共享。
从SIL到HIL
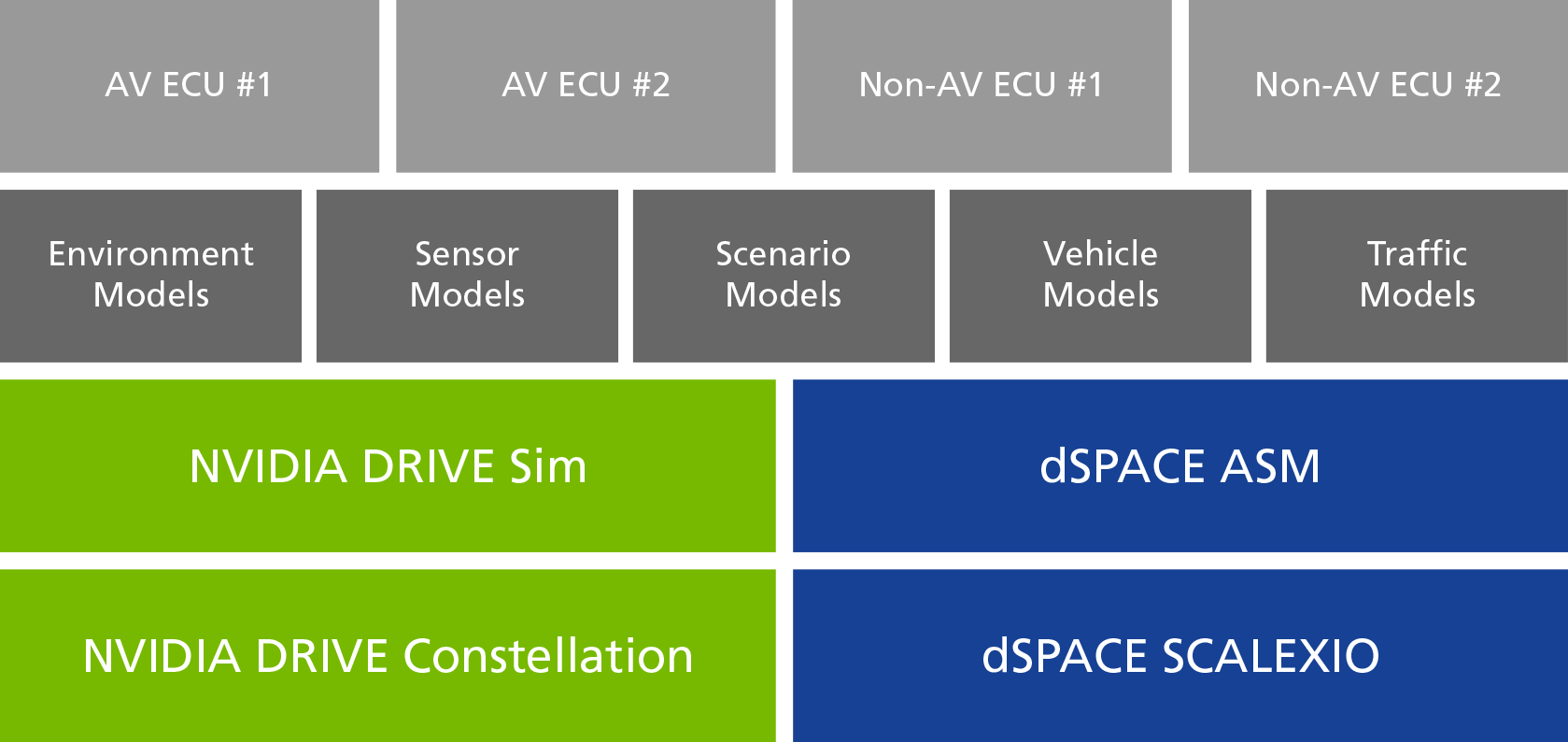
dSPACE ASM和NVIDIA DRIVE Sim不仅可以针对SIL应用案例协作,也可以在HIL仿真环境中协作。对于HIL仿真,ASM在dSPACE SCALEXIO仿真器上运行,而DRIVE Sim则在 NVIDIA DRIVE Constellation平台 上部署。将DRIVE Constellation连接至dSPACE SCALEXIO HIL仿真器,可以为ADAS/AV开发人员提供 各种各样的功能 。
DRIVE Constellation的适用范围是AV ECU的HIL测试。DRIVE Constellation与dSPACE SCALEXIO 相连,将其他ECU、Restbus仿真和/或故障注入单元集成到HIL系统中,可以拓展该范围(图2)。SCALEXIO的主要特点包括可根据任何计算及I/O要求扩展、一流的闭环性能,基于FPGA技术、全面、精确又快速的I/O功能,并通过功能模型接口(FMI)支持向多个第三方仿真环境开放。
Mercedes-Benz最近选择将NVIDIA和dSPACE作为其AV HIL仿真平台的供应商。该HIL平台是定制而成,由dSPACE SCALEXIO和NVIDIA DRIVE Constellation / DRIVE Sim的各种硬件及软件组件组成。
对于Mercedes-Benz这样的客户来说,dSPACE的高保真ASM与NVIDIA丰富的3D环境和用于虚拟测试的精确传感器模型相结合,会带来出色的自动驾驶汽车仿真和验证可行性。工程师可以结合dSPACE和NVIDIA的解决方案,执行各种验证任务,包括测试单个或多个ECU,以及整车大规模仿真测试。
由Alicia Garrison、Michael Peperhowe、Christian Woerdehoff、Holger Krumm(均来自dSPACE)、Carène Kamel(NVIDIA)、Martijn Tideman(NVIDIA)提供
《dSPACE杂志》,2022年3月出版

