Developments in advanced driver assistance systems (ADAS) and autonomous vehicles (AV) are driving a tremendous amount of innovation, primarily in the software domain. However, these systems require intense testing to ensure safety - and this testing must be done very early in the development process, on a large scale, and in a simulated environment (virtual world) that is as close to reality as possible.
In the virtual world, the testing of ADAS and AV functions relies on two critical elements – a physically based, high-performance 3D simulation platform and computer-based simulation models.
The simulation platform must be powerful enough to compute large-data fusion streams from multiple sensors in real-time and the simulation models must be capable of generating realistic behaviors to ensure precise simulation results. Both the platform and the models should be open to allow for adaptations to individual projects and requirements. They should also be of the highest fidelity to achieve the greatest reality.
With these two components, it becomes possible to plug models into the simulation to observe realistic vehicle behavior simulations in real-time.

dSPACE Automotive Simulation Models (ASM) – Ready-to-Use Simulation Models for Virtual Testing
Using dSPACE Automotive Simulation Models (ASM), virtual testing is quick and convenient. These off-the-shelf, ready-to-use simulation models achieve realistic vehicle behavior and traffic simulations in real-time and faster, from model-in-the-loop (MIL), to software-in-the-loop (SIL), to hardware-in-the-loop (HIL), to cloud. The open and modular structure of ASM allows fast and precise adaptations according to the concrete use-case. With ASM, developers can jumpstart development and validation tasks for a wide variety of applications. (Use Case: Simulating Multiple Scenarios for Autonomous Driving.)
NVIDIA DRIVE Sim Powered by Omniverse – Realistic 3D Environments and Physically Accurate Sensor Simulation
NVIDIA DRIVE Sim is a scalable, physically accurate, and open simulation platform built on NVIDIA Omniverse, which provides the core simulation and rendering engines. DRIVE Sim allows for simulation of a wide array of use-cases, from perception training and planning and control simulation to full AV stack validation. DRIVE Sim can run on a local workstation, or scale to multiple GPUs across nodes in the data center or in the cloud. It supports SIL or HIL configurations. For HIL testing at scale, DRIVE Sim can be deployed on NVIDIA DRIVE Constellation.
dSPACE and NVIDIA - A Complete Toolchain
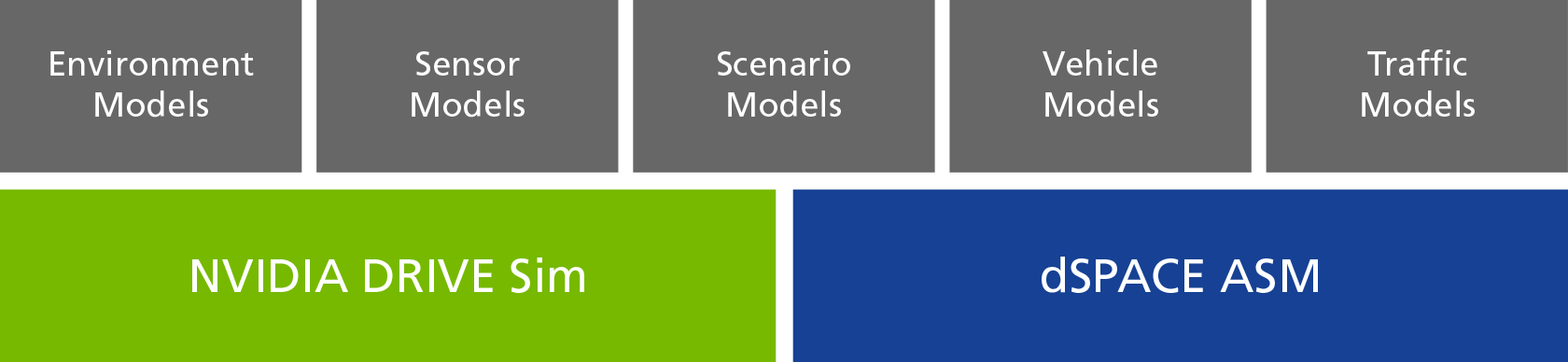
By coupling dSPACE ASM to NVIDIA DRIVE Sim, dSPACE and NVIDIA offer a comprehensive toolchain for testing ADAS/AV systems. The toolchain consists of a wide variety of different simulation models that are easy to parameterize, fast to perform, and can run on various hardware platforms and software simulation solutions. To address the variety of simulation aspects, the dSPACE-NVIDIA toolchain consists of the following models:
- Environment models – recreate a 3D view of the vehicle’s surroundings
- Sensor models (i.e., radar, lidar, camera, ultrasonic, IMU, GNSS) – evaluate how the vehicle is perceiving its surrounding environment
- Vehicle models (also referred to as vehicle dynamics models) – observe the vehicle in motion by simulating individual components (e.g., emergency brake), sub-systems (e.g., drivetrain) and/or the entire virtual vehicle
- Traffic models – simulate real-world traffic with surrounding vehicles and other road users, such as pedestrians
- Scenario models – generate an unlimited variety of realistic scenarios for testing autonomous driving functions
Each of these models can come from dSPACE, from NVIDIA, or from ecosystem partners.
The dSPACE-NVIDIA simulation solution brings a deeper level of insight into testing autonomous systems. For example, when vehicle models are integrated into the test loop, the environment perception sensor’s field of vision can be validated by creating realistic movements of the mounted sensors using pitch, roll, and yaw angles. It’s also possible to consider the motion control interfaces of the AV controller to the vehicle to better understand the impact of the AV algorithm on the powertrain, braking, and steering systems.
Furthermore, the entire AV software stack can be tested in the virtual world. Developers can create as many challenging scenarios as needed to evaluate systems and identify areas of improvement. Scenarios can be easily reproduced to make minor adjustments to re-evaluate a variation of the same scenario (i.e., add an oncoming vehicle, change a traffic object, change speeds, etc.). Simulations can be played back, modified, replayed, and shared.
From SIL to HIL
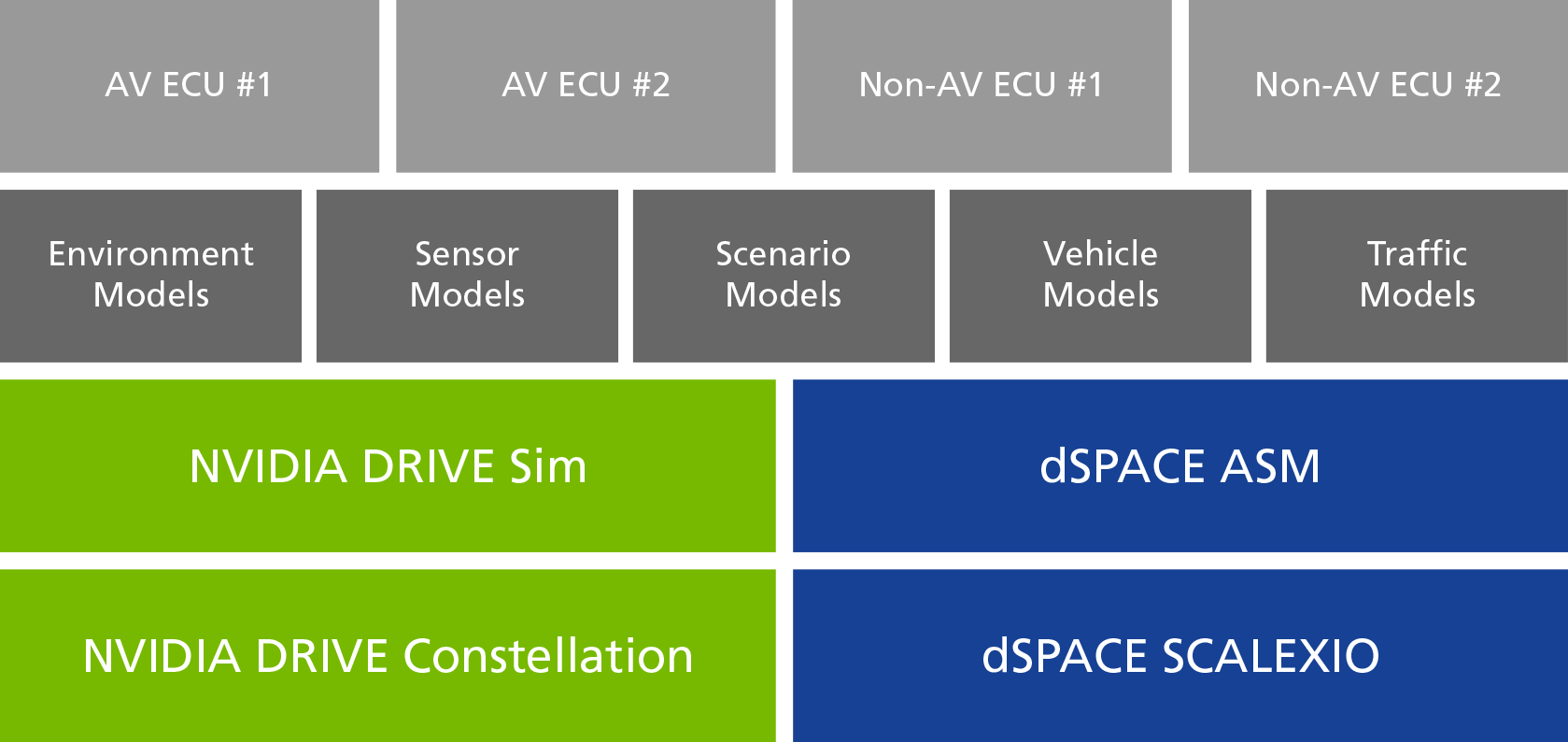
dSPACE ASM and NVIDIA DRIVE Sim work together not only for SIL use-cases, but also in HIL simulation environments. For HIL simulation, ASM runs on dSPACE SCALEXIO simulators, whereas DRIVE Sim deploys on the NVIDIA DRIVE Constellation platform. Connecting DRIVE Constellation to dSPACE SCALEXIO HIL simulators offers ADAS/AV developers access to a wide range of functionalities.
The scope of DRIVE Constellation is HIL-testing of the AV ECU. Connecting DRIVE Constellation with dSPACE SCALEXIO extends this scope by integrating other ECUs, rest bus simulation, and/or failure injection units into the HIL-system (figure 2). SCALEXIO’s key features include scalability to any computation and I/O requirements, best-in-class closed-loop performance, comprehensive, precise, and fast I/O capabilities based on FPGA technology, and openness for several third-party simulation environments via Functional Mock-up Interface (FMI) support.
Mercedes-Benz recently selected both NVIDIA and dSPACE as suppliers for its AV HIL simulation platform. The HIL platform is custom-built and composed of various hardware and software components from dSPACE SCALEXIO and NVIDIA DRIVE Constellation / DRIVE Sim.
For customers such as Mercedes-Benz, the possibilities to simulate and validate AVs are boundless with the combined power of dSPACE’s high-fidelity ASM and NVIDIA’s rich 3D environment and physically accurate sensor models for virtual testing. From testing single or multiple ECUs to full-vehicle, large-scale simulation tests, engineers can reliably perform validation tasks side-by-side with solutions from dSPACE and NVIDIA.
------------------------------------
NVIDIA GPU Technology Conference (GTC): To learn more about dSPACE, check out the presentation by Christopher Wiegand, Product Manager: “A Holistic View on AV Validation Based on High-Fidelity Simulation”
by Alicia Garrison, Michael Peperhowe, Christian Woerdehoff, Holger Krumm (all dSPACE), Carène Kamel (NVIDIA), Martijn Tideman (NVIDIA)
dSPACE MAGAZINE, PUBLISHED MARCH 2022

