先進運転支援システム(ADAS)や自動運転(AD)の開発に伴い、主にソフトウェアの領域で膨大な数の革新的技術が生み出されています。ただし、これらのシステムには安全性を保証するための集中的なテストが必要です。そしてこのようなテストは、開発プロセスの非常に早期の段階で大規模かつ可能な限り現実に近いシミュレーション環境(仮想世界)で行われる必要があります。
仮想世界でADASやADの各種機能を適切にテストできるかどうかは、物理ベースの高性能3Dシミュレーションプラットフォームとコンピュータベースのシミュレーションモデルという2つの極めて重要な要素が鍵となります。
シミュレーションプラットフォームには、複数のセンサから送られる大規模なデータフュージョンストリームをリアルタイムに計算できるだけの処理能力が必要です。また、シミュレーションモデルには現実的な動作を生み出して高精度のシミュレーション結果を保証できるだけの性能が必要です。そのため、プラットフォームとモデルのいずれにも、個々のプロジェクトや要件に合わせて調整できるためにオープン性があることが望まれ、また最大限に現実的であるため高度な忠実性も求められるのです。
この2つの要素を保証できれば、さまざまなモデルをシミュレーションに組み込んで車両動作を現実的かつリアルタイムにシミュレートすることが可能です。

dSPACE Automotive Simulation Models(ASM) – 速やかに使用できる仮想テスト向けシミュレーションモデル
dSPACE Automotive Simulation Models (ASM)は、仮想テストをすばやく行え、使い勝手も高いです。これらの速やかに使用できる市販のシミュレーションモデルは、MIL(Model-in-the-Loop)からSIL(Software-in-the-Loop)、HIL(Hardware-in-the-Loop)、クラウドに至るまでの現実的な車両動作や交通のシミュレーションをリアルタイムおよびそれ以上の速度で実行することができます。ASMはオープンなモジュール型構造を持っているため、具体的な使用事例に合わせて高精度かつ迅速な変更をサポートしています。ASMがあれば、開発者の方にはさまざまなアプリケーションの開発や妥当性確認において、ジャンプスタートをしていただけます。( 使用事例 :複数の自動運転シナリオのシミュレーション)
OmniverseをベースとしたNVIDIA DRIVE Simにより、現実的な3D環境と物理的に高精度なセンサシミュレーションを実現
NVIDIA DRIVE Sim は、スケーラブルで物理的に高精度かつオープンなシミュレーションプラットフォームであり、その中核となるのはシミュレーションおよびレンダリングエンジンを提供する NVIDIA Omniverse です。DRIVE Simは、認知トレーニングや計画・制御のシミュレーションから完全なADスタックの妥当性確認に至るまで、幅広い使用事例のシミュレーションに対応しています。DRIVE Simはローカルのワークステーションで動作しますが、データセンターやクラウド上の各ノードをまたぐ複数のGPUに拡張することもできます。また、SILやHILへの対応もサポートしており、大規模なHILテストの場合は NVIDIA DRIVE Constellation 上に展開されます。
dSPACEとNVIDIA社の協力による完全なツールチェーン
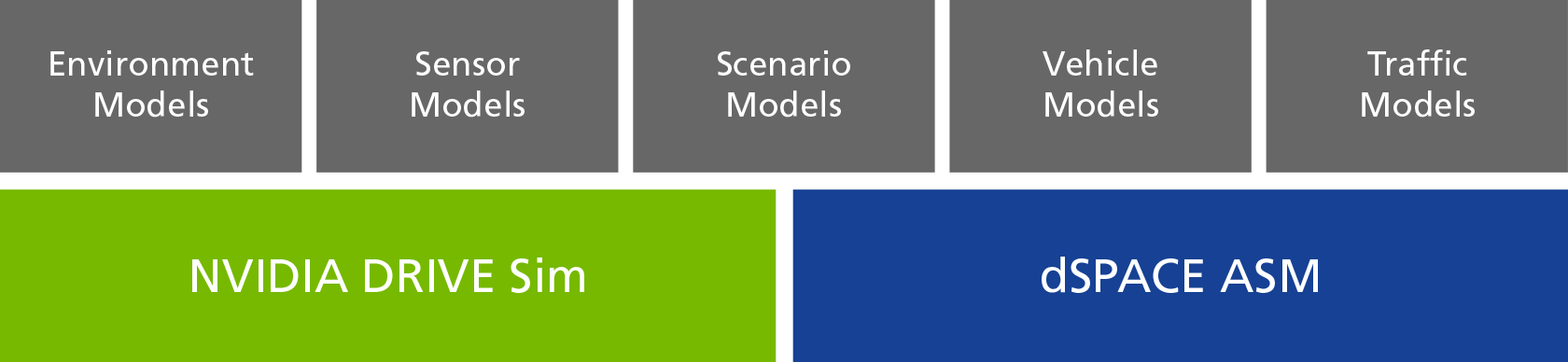
dSPACEとNVIDIA社の連携に基づいてdSPACE ASMとNVIDIA DRIVE Simを連携させることにより、ADAS/ADシステムのテスト向けの総合的なツールチェーンが実現しました。このツールチェーンは、極めて多様なシミュレーションモデルで構成されています。そのモデルは、容易にパラメータ調整ができるだけでなく、各種の実行も速やかに行うことができるものです。また、さまざまなハードウェアプラットフォームやソフトウェアシミュレーションソリューション上で動作します。dSPACEとNVIDIA社の協力で実現したこのツールチェーンは、シミュレーションのさまざまな側面に対応するため、次のモデルが採用されています。
- 環境モデル – 車両の周辺を3Dビューで再現
- センサモデル (レーダー、LiDAR、カメラ、超音波、IMU、GNSSなど)– 車両の周辺環境の認知方法を評価
- 車両モデル (ビークルダイナミクスモデル) – 個々の要素(緊急ブレーキなど)、サブシステム(ドライブトレインなど)、およびバーチャルビークル全体をシミュレートして車両の走行動作を確認
- トラフィックモデル – 周辺車両や歩行者などの道路利用者を含む実際の交通環境をシミュレート
- シナリオモデル – 自動運転機能のテスト向けに現実に即した極めて広範囲なシナリオを生成
各モデルはdSPACE製、NVIDIA製、またはエコシステムパートナー製のツールで構成することができます。
dSPACEとNVIDIA社の協力で実現したシミュレーションソリューションは、自動運転システムのテストにおいてさらに深い洞察をもたらします。たとえば、車両モデルをテストループに統合する際に、ピッチ角、ロール角、およびヨー角の動きに対応した搭載センサの現実的な動作を作り出すことで、環境認識センサの視野の妥当性を確認したり、車両用のADコントローラのモーション制御インターフェースを考慮することで、ADアルゴリズムがパワートレイン、ブレーキ、およびステアリングシステムに与える影響についてより深くテストを実施することが可能です。
さらに、ADソフトウェアスタック全体を仮想世界でテストすることもできます。つまり、開発者は改善すべき部分を特定するため、現実では困難なシナリオを必要なだけ作成してシステムを評価することができるということです。また、シナリオは簡単に複製して変更できるため、同一シナリオのバリエーション(対向車の追加、トラフィックオブジェクトの変更、速度の変更など)を作って再評価すること可能です。各シミュレーションは簡単に再生、修正、リプレイ、および共有することができます。
SILやHILに対応
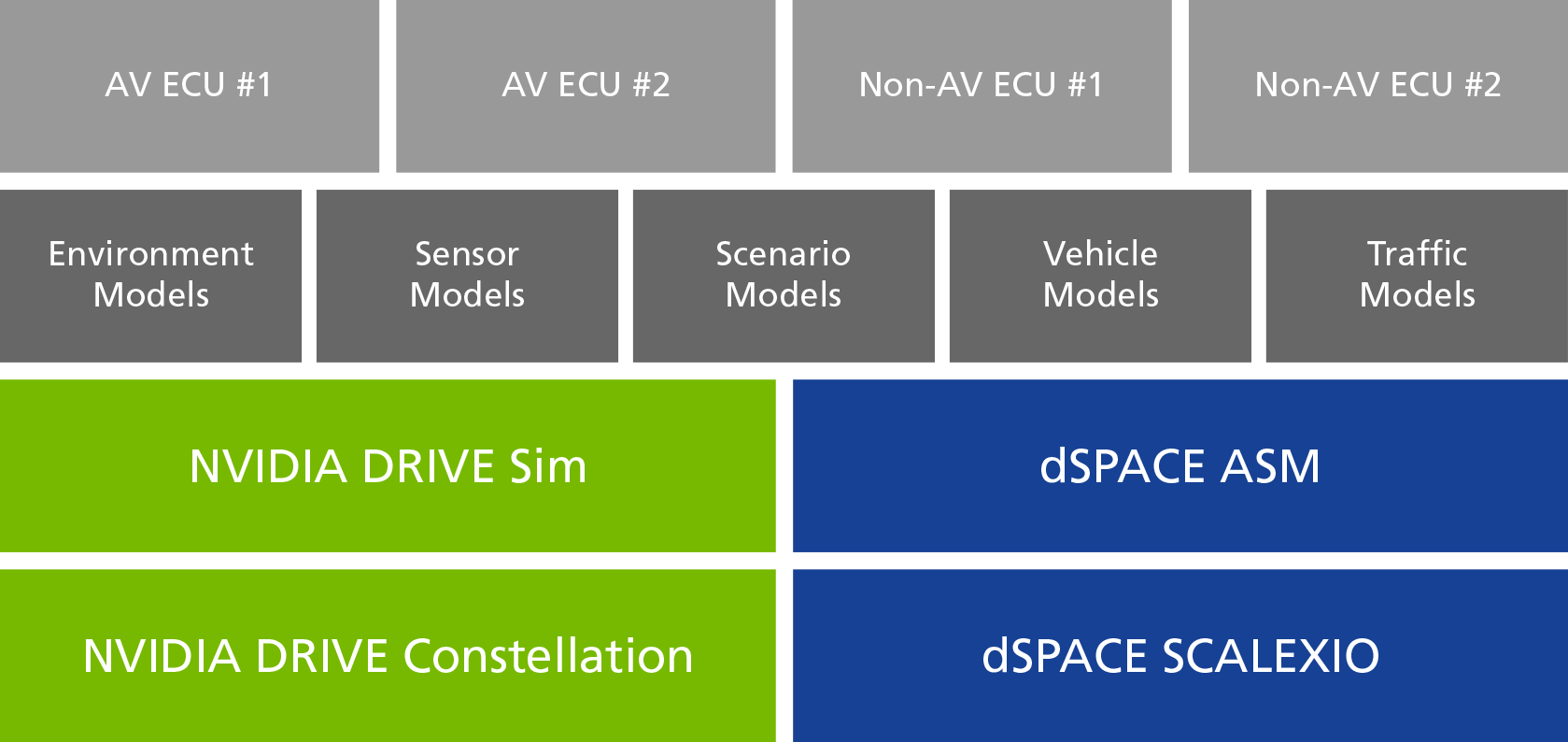
dSPACE ASMとNVIDIA DRIVE Simは、SILの使用事例だけでなく、HILシミュレーション環境においても連携させることができます。HILシミュレーションにおいては、ASMはdSPACE SCALEXIOシミュレータで実行され、DRIVE Simは NVIDIA DRIVE Constellationプラットフォーム 上に展開されます。ADAS/AD開発者は、DRIVE ConstellationをdSPACE SCALEXIO HILシミュレータに接続することにより、 さまざまな機能にアクセスできます 。
DRIVE Constellationは、AD ECUのHILテストに対応しています。また、DRIVE ConstellationにdSPACE SCALEXIOを接続して他のECU、レストバスシミュレーション、または欠陥生成ユニットをHILシステムに統合すれば、この適用範囲はさらに拡大されます(図2)。SCALEXIOの主な特長には、あらゆる計算およびI/O要件に対応できる拡張性、クラス最高のクローズドループ性能、FPGAテクノロジをベースとした総合的で高精度な高速I/O機能、Functional Mock-up Interface(FMI)を介して複数のサードパーティ製シミュレーション環境を使用できるオープン性などがあります。
Mercedes-Benz社では最近、NVIDIA社とdSPACEの両方をAD HILシミュレーションプラットフォームのサプライヤとして選定しました。同社のHILプラットフォームはオーダーメイドで作成され、dSPACE SCALEXIOおよびNVIDIA DRIVE Constellation / DRIVE Simのさまざまなハードウェアおよびソフトウェアコンポーネントで構成されています。
Mercedes-Benz社のように、忠実度の高いdSPACEのASMとNVIDIA社の豊かな3D環境や物理的に高精度なセンサモデルを融合した仮想テスト環境を採用したお客様は、AD機能のシミュレーションおよび妥当性確認の可能性を無限に広げることが可能です。エンジニアがdSPACEとNVIDIA社のソリューションを併用すれば、単一または複数のECUのテストから車両全体の大規模なシミュレーションテストに至るまで、さまざまな妥当性確認を確実に実行できます。
------------------------------------
NVIDIA GPUテクノロジカンファレンス( GTC ):dSPACEの詳細については、プロダクトマネージャであるChristopher Wiegandの講演 A Holistic View on AV Validation Based on High-Fidelity Simulation(忠実度の高いシミュレーションに基づいたAD機能の妥当性確認の全体論)
Alicia Garrison、Michael Peperhowe、Christian Woerdehoff、Holger Krumm(以上、dSPACE)、Carène Kamel氏(NVIDIA社)、Martijn Tideman氏(NVIDIA社)
dSPACE MAGAZINE、2022年3月発行

