使用事例:HILシミュレーションのためのFunctional Mock-up Unitの統合
この使用例では、各種ベンダー製のFunctional Mock-up Unit(FMU)を統合して、HIL(Hardware-in-the-Loop)シミュレーション向けの単一のリアルタイム対応アプリケーションを作成する方法を示します。
使用例
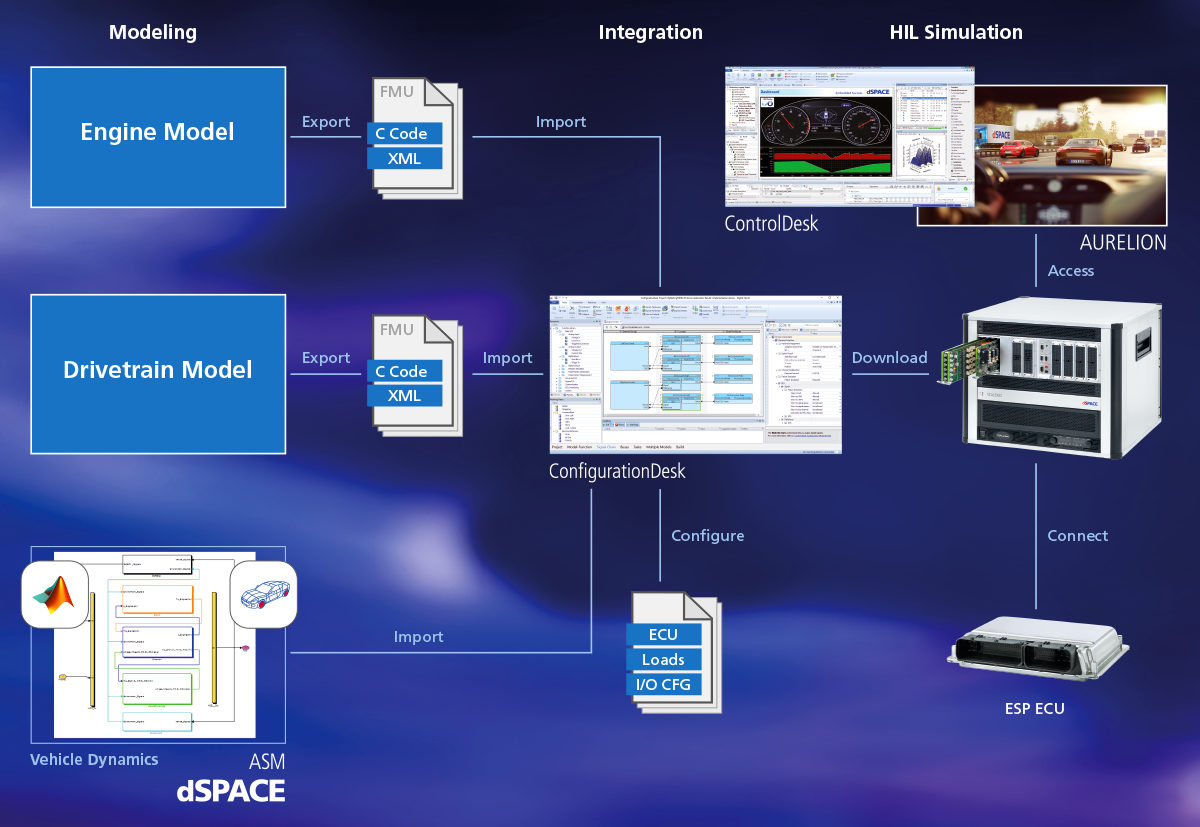
デモシステムは、dSPACE SCALEXIO HILシステムに接続された車両安定化プログラム(ESP)ECU、シミュレーション運転を制御してビジュアル表示するdSPACE ControlDeskとAURELION、および各モデルを統合して単一のアプリケーションを作成するdSPACE ConfigurationDeskで構成されています。
まず使用するのは、すべてのモデル部品をdSPACE Automotive Simulation Modelsで実現した既存のESP ECU HILテストシステムです。
ここでの目的は、バーチャルビークルシミュレーションモデルの一部を、物理モデリング(非因果的)手法に基づき開発された新しいモデルに置き換えることです。それらのモデルは、Simulinkとは別のツールを使用して、FMUとしてエクスポートすることができます。
ビークルダイナミクスと環境モデルは、引き続きdSPACE Automotive Simulation Modelsでモデリングされたものとします。元のエンジンとドライブトレインのASMモデルに代わって、Functional Mock-up Interfaceに基づくリアルタイム対応CコードFMUが使用されました。統合されたすべてのモデル部品のサンプル時間は1 msです。

スクリーンショットは、ドライブトレインFMUを使用したSimulinkのモデル通信インターフェースの一例です。モデルポートブロックを使用して、SimulinkモデルのFMUインターフェースを表すポートを作成します。このインターフェースは、ConfigurationDeskを介して分析および接続できます。

ConfigurationDeskは、SCALEXIOハードウェア、MicroAutoBox III、およびMicroLabBox II用のグラフィカルな設定および実装ソフトウェアです。2個のFMUがConfigurationDeskにインポートされ、既存のシミュレーションモデルと統合されます。これは、Simulinkで作成されたモデルポートブロックにFMUインターフェースを接続し、単一のリアルタイム対応アプリケーションを作成することにより行われます。そして、このシミュレーションモデル全体がSCALEXIO HILシミュレータにダウンロードされます。この使用例では、FMUはSimulinkとのモデル通信により既存のシミュレーションモデルに統合されます。FMUを直接ConfigurationDeskのI/Oチャンネルやその他のFMUに接続することもできます。


このシステムでは、ESP ECUの機能をテストします。例えば、滑りやすい路面で自動車がブレーキをかけるというシナリオを比較できるように、シミュレーション運転は2回(つまり、1回はESP ECUをオフに、もう1回はオンにして)実行されます。

このシミュレーション運転は、AURELIONによりビジュアル表示されるため、自動車の動作を目視で確認できます。ESP ECUをオフにした1回目のシミュレーション運転では、ブレーキ中に自動車が横滑りを始め、スピンします。
