Anwendungsfall: Integrieren von Functional Mock-up Units für die HIL-Simulation
Dieser Anwendungsfall zeigt, wie FMUs (Functional Mock-up Units) unterschiedlicher Anbieter zu einer echtzeitfähigen Applikation für die Hardware-in-the-Loop (HIL)-Simulation integriert werden können.
Der Anwendungsfall
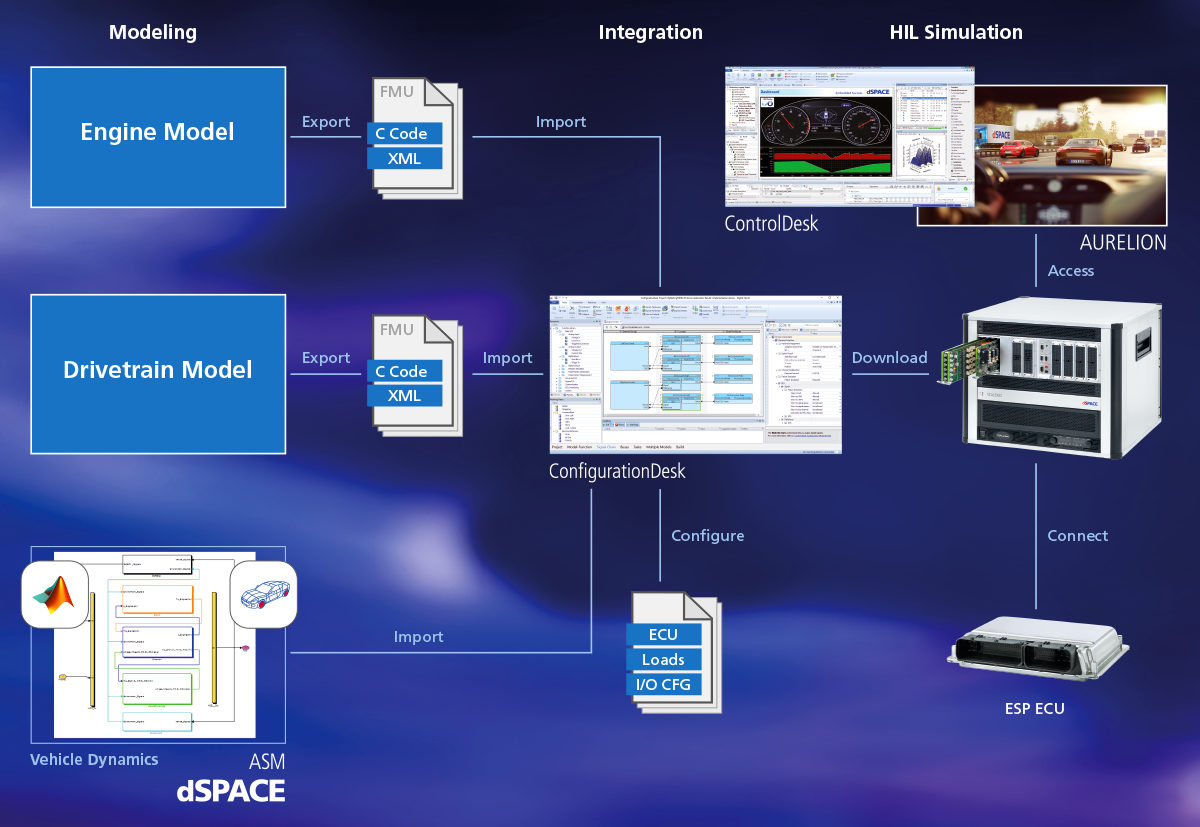
Das System besteht aus einem ESP (elektronisches Stabilitätsprogramm)-Steuergerät, das mit dem dSPACE HIL-System SCALEXIO verbunden ist. Zum Steuern und Visualisieren der Simulationsdurchläufe kommen ControlDesk und AURELION zum Einsatz sowie dSPACE ConfigurationDesk für die Integration der Modelle zu einer Applikation.
Ausgangspunkt ist ein bestehendes ESP-Steuergeräte-HIL-Testsystem, bei dem alle Modellteile mit den dSPACE Automotive Simulation Models realisiert wurden.
Ziel ist es nun, einige Teile des virtuellen Fahrzeugsimulationsmodells durch neue Modelle zu ersetzen, die nach einem physikalischen Modellierungsansatz (akausal) und mit anderen Werkzeugen als Simulink entwickelt wurden und den Export des Modells als FMUs ermöglichen.
Um die Fahrdynamik und das Umgebungsmodell zu modellieren, kamen die dSPACE Automotive Simulation Models zum Einsatz. Die originalen ASM-Motor- und Antriebsstrangmodelle wurden ersetzt durch echtzeitfähige C-Code-FMUs, basierend auf Functional Mock-up Interface. Die Abtastrate für alle integrierten Modellteile betrug 1 ms.

Der Screenshot ist ein Beispiel für die Kommunikationsschnittstelle des Modells in Simulink mit der FMU des Antriebsstrangs. Die Ports, die die FMU-Schnittstelle im Simulink-Modell repräsentieren, werden aus Model-Port-Blöcken erstellt. Diese Schnittstelle lässt sich über ConfigurationDesk analysierten und anbinden.

ConfigurationDesk ist die grafische Konfigurations- und Implementierungssoftware für die SCALEXIO-Hardware, die MicroAutoBox III und die MicroLabBox II. Die beiden FMUs werden in ConfigurationDesk importiert und in das bestehende Simulationsmodell integriert. Dazu werden die FMU-Schnittstellen mit den in Simulink erstellten Model-Port-Blöcken verbunden und eine echtzeitfähige Applikation erstellt. Das gesamte Simulationsmodell wird anschließend auf den SCALEXIO-HIL-Simulator heruntergeladen. In dem Fall dient die Modellkommunikation mit Simulink dazu, die FMUs in das bestehende Simulationsmodell zu integrieren. Alternativ kann eine FMU auch direkt mit den I/O-Kanälen oder mit anderen FMUs in ConfigurationDesk verbunden werden.

ControlDesk übernimmt das Starten und Steuern der Simulation. Die fotorealistischen Experiment-Layouts vermitteln den Eindruck eines realen Armaturenbretts.

Alle Modellvariablen und Parameter wie Gierrate, Bremsdruck und Geschwindigkeit werden während der Simulation in Echtzeit abgebildet, damit Sie den aktuellen Status jederzeit im Blick haben.
Das System testet die Funktionen eines ESP-Steuergeräts. Dasselbe Simulationsszenario – Fahrzeug bremst auf rutschiger Fahrbahn – wird zum Vergleich zweimal durchgeführt: einmal mit aktiviertem und einmal mit deaktiviertem ESP-Steuergerät.

AURELION visualisiert den Simulationsdurchlauf, so dass Sie verfolgen können, wie sich das Fahrzeug verhält. Im ersten Simulationsdurchlauf mit deaktiviertem ESP-Steuergerät schlittert das Fahrzeug beim Bremsen und dreht sich.
