Cas d'utilisation : Intégrer des Functional Mock-up Units pour la simulation HIL
Ce cas d'utilisation démontre comment des FMU (Functional Mock-up Units) de différents fournisseurs peuvent être intégrées afin d'obtenir une application temps réel pour la simulation Hardware-In-the-Loop (HIL).
Le cas d'utilisation
Le système comprend un calculateur ESP (Electronic Stability Program), connecté à un système HIL SCALEXIO de dSPACE, équipé de ControlDesk® et d'AURELION de dSPACE pour le contrôle et la visualisation du déroulement de la simulation ainsi que de ConfigurationDesk® de dSPACE pour l'intégration des modèles dans une application.
Le point de départ est un système de test HIL de calculateur ESP existant avec toutes les parties du modèle réalisées avec les Automotive Simulation Models de dSPACE.
L’objectif est désormais de remplacer certaines parties du modèle de simulation virtuelle du véhicule par de nouvelles parties développées selon une approche de modélisation physique (acausal) et par d’autres outils que Simulink, permettant l’exportation du modèle sous forme de FMU.
La dynamique véhicule et le modèle d'environnement restent modélisés avec les Automotive Simulation Models (ASM) de dSPACE. Les modèles ASM d'origine du moteur et de la transmission ont été remplacés par des FMU temps réel sous forme de code C et basées sur la Functional Mock-up Interface. Le temps d'échantillonnage de toutes les parties de modèle intégrées est de 1 ms.
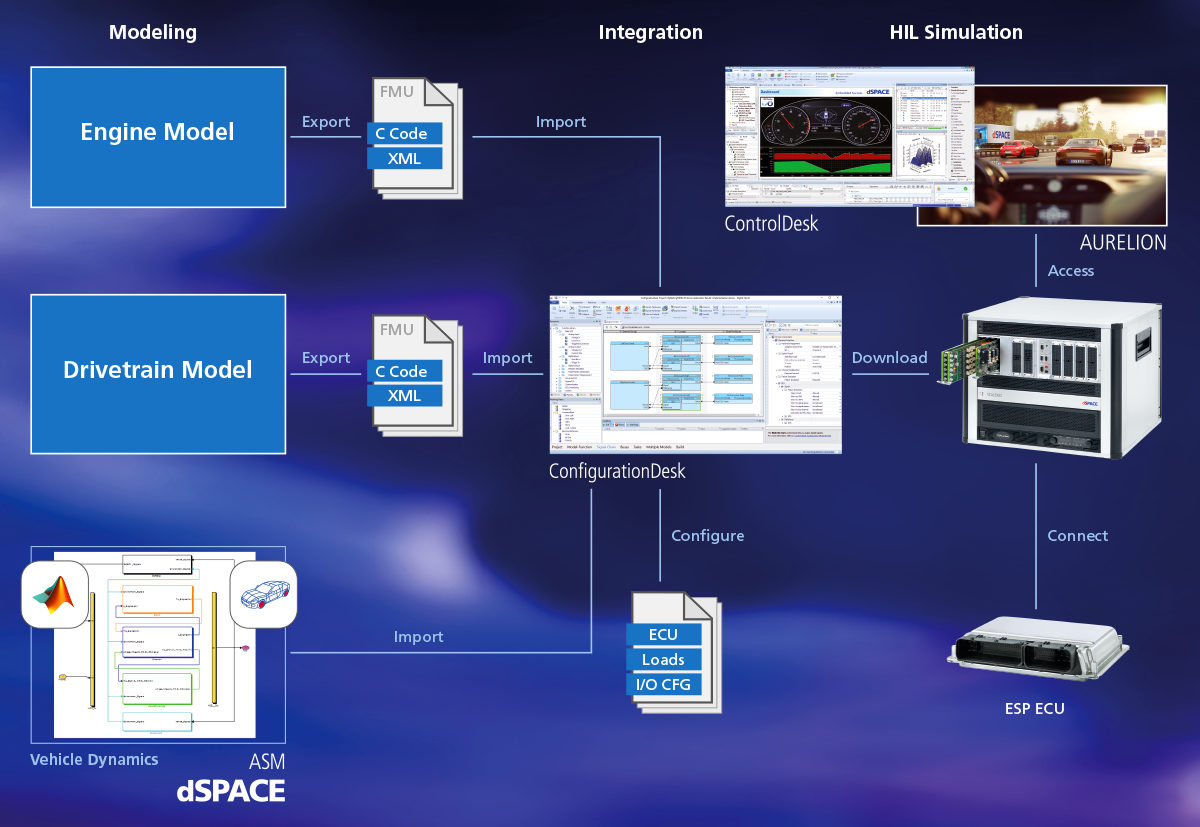

La capture d'écran est un exemple de l'interface de communication du modèle dans Simulink avec la FMU de transmission. Les blocs de port du modèle sont utilisés pour créer les ports représentant l'interface FMU dans le modèle Simulink. Cette interface peut être analysée et connectée via ConfigurationDesk.

ConfigurationDesk est le logiciel de configuration graphique et d'implémentation du matériel SCALEXIO, de la MicroAutoBox III et de la MicroLabBox II. Les deux FMU sont importées dans ConfigurationDesk et intégrées au modèle de simulation existant. Cela est effectué en connectant les interfaces FMU aux blocs de port du modèle créés dans Simulink afin d'obtenir une seule application temps réel. Ce modèle de simulation global est ensuite téléchargé sur le simulateur HIL SCALEXIO. Dans ce cas la communication du modèle avec Simulink est utilisée pour intégrer les FMU au modèle de simulation existant. Il serait également possible de connecter directement une FMU aux canaux d'E/S ou à d'autres FMU dans ConfigurationDesk.

ControlDesk est utilisé pour démarrer et contrôler le déroulement de la simulation. Les layouts expérimentaux photoréalistes donnent une idée de l'apparence finale que pourrait avoir le tableau de bord du véhicule.

Toutes les variables et tous les paramètres du modèle, tels que la vitesse de lacet, la pression de freinage et la vitesse, sont affichés et tracés en temps réel au cours de la simulation afin de vous fournir des informations constamment actualisées sur ce qui se passe.
Le système teste les fonctionnalités d'un calculateur ESP. Le même scénario de simulation – freinage sur chaussée glissante – est effectué deux fois pour comparaison : une fois avec le calculateur ESP désactivé et une fois avec le calculateur ESP activé.

AURELION visualise le déroulement de la simulation de manière à vous montrer le comportement de la voiture. Pour la première simulation, le calculateur ESP est désactivé, la voiture commence à glisser pendant le freinage et tourne sur elle-même.

Quand le calculateur ESP est activé, la manœuvre de freinage permet un arrêt contrôlé de la voiture.