制御システムが判断を独自に下す車両の妥当性を確認する方法は、開発者が直面した新たな課題でした。ZF社では、従来のHILテクノロジとセンサによる現実に即した環境シミュレーションを組み合わせることにより、この課題に対応しました。この目的のため、dSPACEツールチェーンをベースとしたテストシステムが設計されました。

人工知能
人工知能(AI)はコンピュータサイエンスの一分野であり、知的行動と機械学習の自動化を研究対象としています。一般に、人工知能とは、コンピュータをプログラミングしてある程度独自に問題に対処できるようにすることにより、人間が意思決定を行う際の特定の行動を再現しようとするものです。
HILシミュレータのコンセプト
ZF社では、HILシミュレータの開発をdSPACEと協力して行いました。開発したシミュレータはSCALEXIOテクノロジをベースとしており、ステアリング、ブレーキ、Electric Drive、ビークルダイナミクス、およびすべてのセンサを含めた車両全体のシミュレーションを行うことができます。ここでは、すべてのセンサ信号がECUの入力として送信され、出力側では、車両のアクチュエータのHILオペレーションに必要な入出力が提供されると共に、レストバスシミュレーションも行われます。また、dSPACE Automotive Simulation Model(ASM)ツールスイートにより、センサと車両に対するビークルダイナミクスの計算をリアルタイムに行うことで、シミュレーション精度を向上させています。ただし、使用するAIシステム自体には「物理的な」リアルタイム特性や線形の依存関係がないため、これは特に難しい作業となります。そのため、センサおよびアクチュエータ向けの複数のシミュレータを同期化し、それらの間にAI制御ユニットを「挿入」することで、実際の車載条件下と同様の動作が実現するような工夫を施しています。
センサエミュレーション
ZF ProAI制御ユニットは、センサの生データをすべて直接処理するように設計されています。また、センサデータはオブジェクトリストとしても読み込まれます。オブジェクトリストは、ASM Traffic Modelによって提供され、周辺トラフィックのグラウンドトゥルースシミュレーションの一部として処理されます。生データを扱うためには、すべてのセンサを可能な限り現実に即してエミュレートする必要があります。

極めて高精度なセンサ環境シミュレーション
センサの生データの生成には、定義されたテストシナリオに基づいてセンサ環境を計算し、極めて高い精度でシミュレートできるモデルが必要となります。そのため、同社ではdSPACEツールチェーンの物理レーダーモデル、LiDARモデル、およびカメラモデルを使用しています。これらの高精度かつ高分解能モデルにより、センサフロントエンドを含むセンサと周辺環境の間の伝送路を計算できるようになります。送信機から受信機までの全伝送路は、レーダーモデルやLiDARモデルの光線トレーサによって導かれます。また、多重伝播もサポートされています。ここでは、何百万もの光線が同時に放射されますが、その正確な数はそれぞれの3Dシーンによって異なります。いずれのモデルでも、物理的な挙動に基づいて複雑なオブジェクトの反射と拡散を計算します。多重伝播では「ホップ」数を指定することも可能です。また、LiDARモデルはフラッシュセンサと走査センサのいずれにも対応するよう設計されており、カメラモデルは色収差やレンズの汚れなど、さまざまなタイプのレンズや光学効果に対応しています。さらに、リアルタイム要件を満たすためには、グラフィックスプロセッシングユニット(GPU)で極めて複雑な個々のモデルのモデル要素を計算する必要があります。同社では、NVIDIA P6000搭載のSensor Simulation PCをdSPACEリアルタイムシステムにシームレスに統合して使用しています。
当社では強力なdSPACEツールチェーンを活用することにより、可能な限り早期の段階で、AIベースの自動化テクノロジプラットフォームの制御ユニットをセンサやアクチュエータと組み合わせて妥当性確認しています。


テストシナリオの生成
自動運転車両のテストで最も重要なことは、適切なシナリオを生成し、信頼性の高い手法で自動運転機能のテストや妥当性確認を行うことですが、Scenario Editorを使用すると、それが可能になります。Scenario Editorでは、複雑な周辺トラフィックを扱いやすいグラフィカルな手法で再現し、自車(センサを含むテスト対象車両)の運転操作、周辺トラフィックの操作、およびインフラストラクチャ(道路、道路標識、道路沿いの構造物など)を含むシナリオを作成することができます。これにより、車載センサからのデータに基づいて、現実的な3Dの仮想世界が生成されます。また、各種の設定は柔軟に変更できるため、Euro NCAPの標準仕様を厳密に実装したり、都市部を地域ごとに個別に構造化した複雑なシナリオを作成したりしながら、幅広いテストを行うことが可能です。このような3D環境には車両の3Dオブジェクトやセンサ環境モデルが含まれており、ASMによりリアルタイムにシミュレートされています。道路利用者の軌道のシミュレーションは、ASM Traffic Modelで行います。

The two HIL racks contain all components for sensor simulation:
SCALEXIO real-time platform, Sensor Simulation PCs, and ESI Units.
The ZF ProAI control unit to be tested is located in the left-hand rack.
The simulator for the actuators is not shown.


ZF ProAI
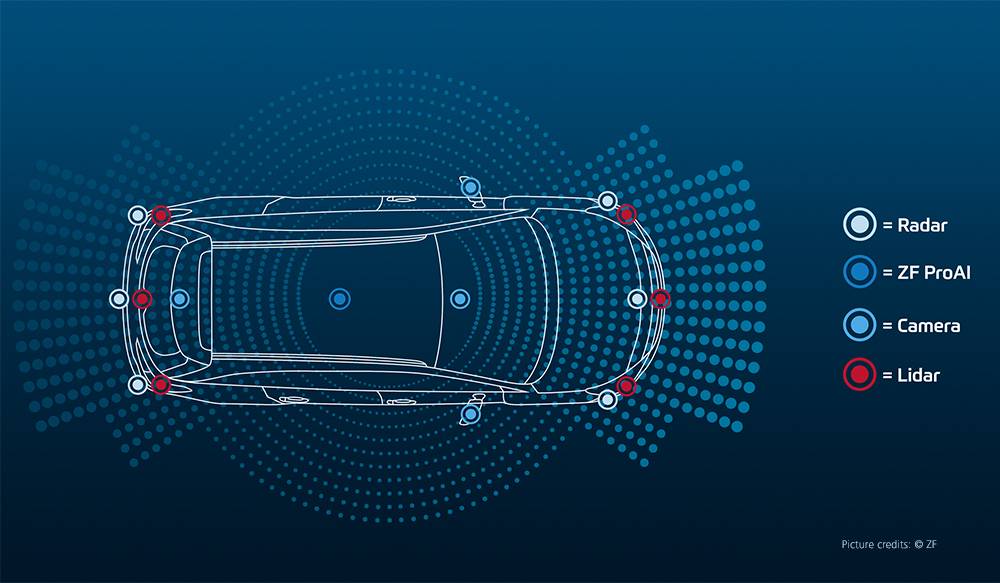
ZF ProAI制御ユニットは、自動運転機能に対応する高い演算処理能力と人工知能(AI)を提供します。このユニットでは、極めて強力かつスケーラブルなNVIDIAプラットフォームにより、カメラ、LiDAR、レーダー、および超音波センサからの信号を処理します。車両の周辺環境をリアルタイムに把握し、ディープラーニングによって経験を収集します。
利用効果
- AI対応
- モデルに応じて最大150 TeraOPSの処理能力(= 1秒間に150兆回の演算を処理)を実装
- 自動運転向けの各種機能に対応
- 高度にスケーラブルなインターフェースおよび機能を搭載
自動運転車両の妥当性確認
ZF社のHILシミュレータネットワークを使用すると、開発者が今後の開発ステップの基盤となる条件を設定したうえで、車両の挙動全体を仮想テクノロジプラットフォーム上に再現して解析することができます。つまり、このシミュレータを使用すれば、初期の開発車両が自動的に適切な走路を検出できるかを確認するテストシナリオを実行したり、雨天時、降雪時、または薄氷上で予測不可能なイベントが発生した場合でも車両が安全に走行できる能力を持っているかをテストすることができます。また、E/Eシステムに断線、短絡、またはバスシステムエラーといった故障を挿入するなど、その他の一般的なHILテスト手法も追加できます。このように、テストカタログを継続的に拡大して包括的なソリューションとすることで、セーフティクリティカルな自動運転システムの機能面における妥当性確認を効率的に行えるようになります。
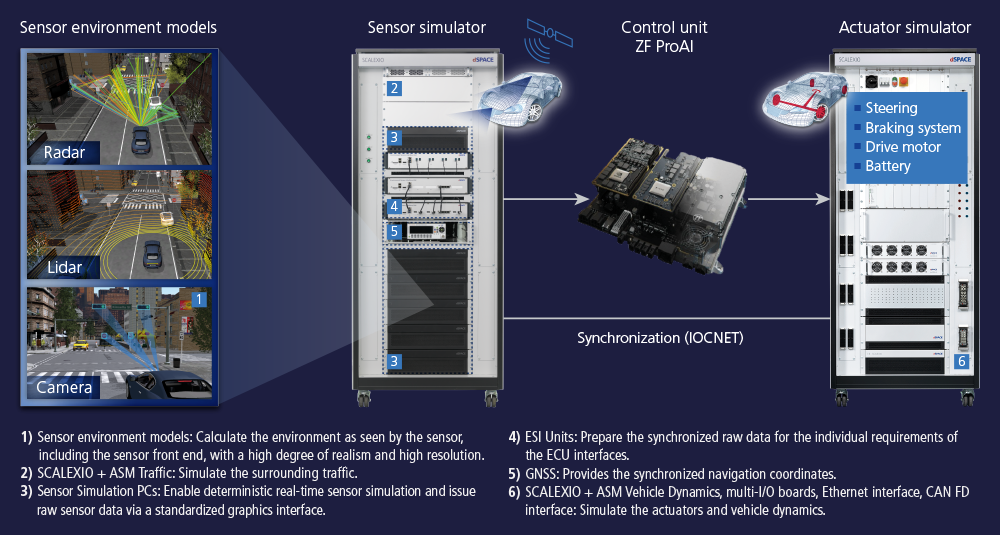
The HIL simulator synchronously generates the surrounding environment of the radar, lidar, and camera sensors, including their front end, in real time and subsequently provides it to the ZF ProAI control unit. ZF ProAI controls the simulated actuators according to the driving strategy.

ディープラーニング
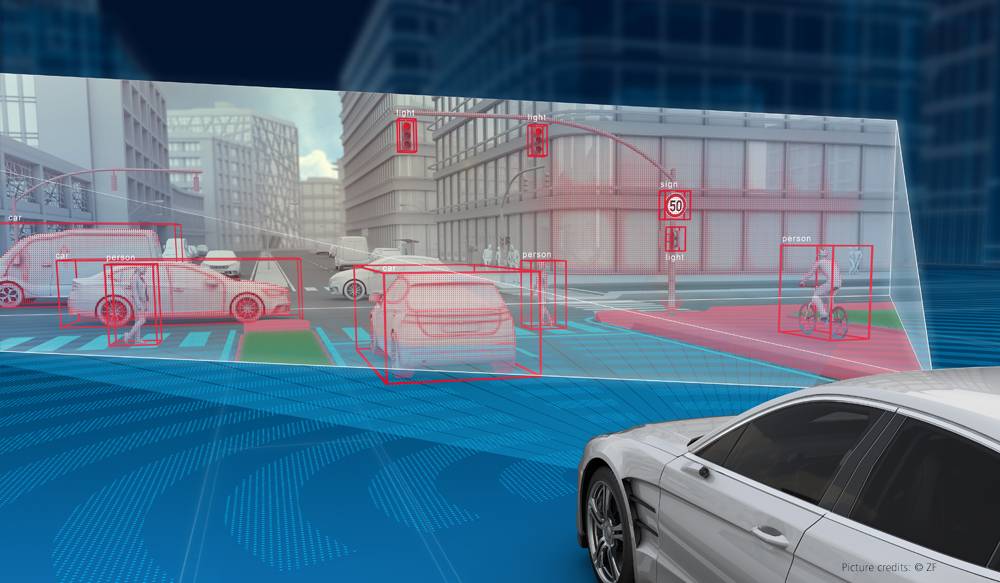
ZF社のエンジニアは、シミュレータを通じて車両にさまざまな運転機能を与えて「トレーニング」します。トレーニングでは、横断歩道での歩行者や歩行者グループとの相互作用、衝突の評価、信号機やロータリーでの挙動など、特に都市の交通状況に重点が置かれています。高速道路や地方道での運転とは異なり、都市部では、コンピュータ制御の車両がその時点の交通状況に基づいてどのような動作を取るべきかを完全に理解することは非常に困難です。
dSPACEの現実に即したセンサシミュレーションモデルを使用すると、複雑な3Dシナリオからセンサの生データを生成し、当社のZF ProAI制御ユニットを直接処理することができます。これにより、複雑かつ現実に即したテストを開発の早期の段階で簡単かつコスト効率良く実行できるようになります。

主な利点
タスク
- 自動運転向けバッテリの電気テクノロジプラットフォームを検証
- AIベースの車両ガイダンス機能をテスト
技術的課題
- すべてのセンサをリアルタイムでエミュレート
- センサをセンサ環境(3D環境)で現実に即してリアルタイムにシミュレートできるセットアップを実現
- 現実的なトラフィックを通じて車両挙動全体をシミュレート
ソリューション
- レーダー、LiDAR、およびカメラの各センサを高精度でシミュレートできるリアルタイムプラットフォームを構築
- トラフィック、ビークルダイナミクス、およびElectric Driveをリアルタイムにシミュレート
- シナリオごとに調整を行いつつ仮想3D環境でテスト
著者について:

Oliver Maschmann
Oliver Maschmann is project manager at ZF in Friedrichshafen and responsible for the setup and operation of the HIL test benches for full vehicle integration testing.