現在の車両開発において、効率性の向上と脱炭素化の推進は重要な要素です。何らかの対策を施した際に、その実効の程度を早期かつ、かつてなく短い開発サイクルにおいて見極めたい場合、詳細な車両モデルを提供するdSPACE ASMとリアルな交通を再現するPTV Vissimの2つを組み合わせた協調シミュレーションが有用です。この組み合わせは、驚くほど精密な見識をもたらします。
モビリティの活用は人間の基本的なニーズであり、多くの場合、社会参加の必須条件でもあります。しかし、ドイツにおいて最終的なエネルギーの1/4以上は交通輸送分野によって消費されており、それに伴って排気ガスも放出されています。したがって、同分野は人為的な気候変動への取り組みに大きな貢献をしなければなりません。現在の車両開発は、効率性と持続可能性の探究が主軸となっており、フリート排出量の上限として定められた野心的な目標値が、この枠組みを形作っています。たとえば、現在ドイツで購入される新しい乗用車のほぼ2台に1台は既にハイブリッドまたは電気自動車であり、遅くとも2030年までには欧州などの主要市場において新規の車両登録はバッテリ式電気自動車が優勢に立ちそうです。

効率化できる可能性を見極めて活用
車両の効率性を高めるための手法にはさまざまなアプローチが存在しており、車両のコンセプトや(SUVやセダンといった)車種を適切に選択することから、駆動システムや各種コンポーネントの設計や動作方式の最適化に至るまで、多岐にわたります。バッテリ式電気自動車では、効率性の向上が充電1回あたりの走行距離の増加に直結しているため、バッテリ容量の拡張を抑えることができます。しかしWLTP(乗用車等の国際調和排出ガス・燃費試験法)などの標準化されたテストサイクルを用いたとしても、それが評価できるのは、実際に市場や顧客に関連する燃費向上の可能性のみにとどまります。燃費向上の可能性を確実に評価するには、さまざまな交通状況、経路、および環境パラメータに基づいたテストが求められます。ただしこれを実際のテストとして実行するには、多額の費用がかかり、かつプロジェクトは十分に成熟したレベルに到達していなければなりません。
現実的なシミュレーションで効率化手法を総合的に評価
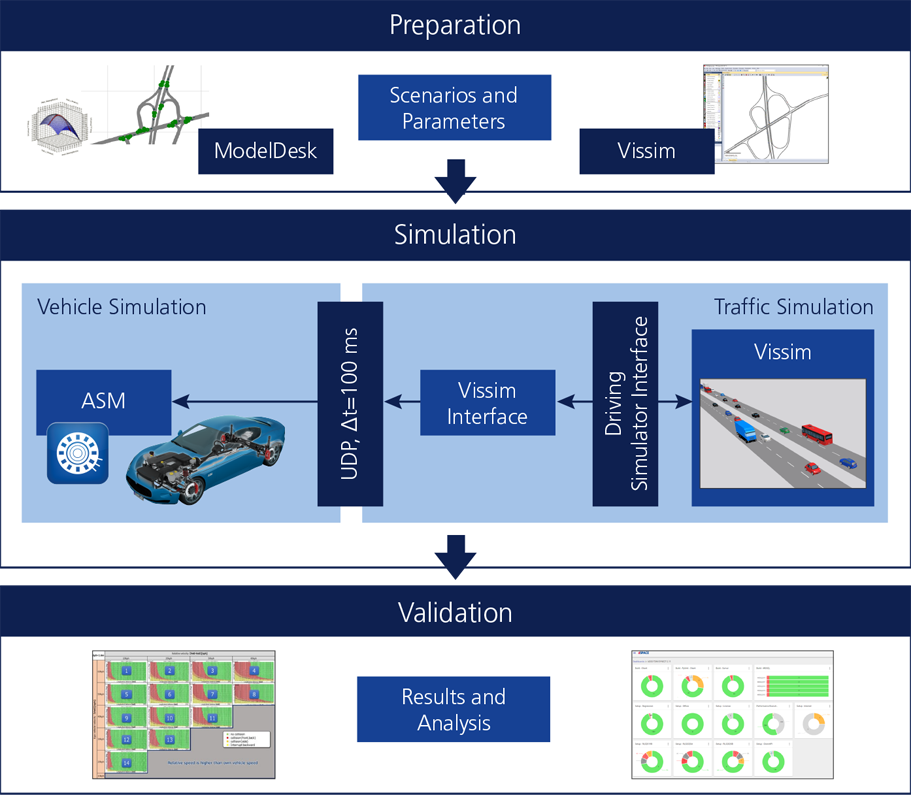
そこで実際のテストに代わる効率的な選択肢となるのがシミュレーションによる評価です。効率性と可能な限りの最適化手法を効果的に評価するためには、車両と交通・運転環境の両方を極めて詳細かつ現実的にモデリングすることが求められますが、それには特定の分野の知識に基づき高度に専門化されたソフトウェア環境の構築が必要です。その一方で、わずかな変化の影響も見逃さないようにするためには、関連するすべてのコンポーネントや動作方式を含む車両全体の詳細なシミュレーションも求められます。さらに他方では、交通網を正確にマッピングしたり、さまざまな経路や状況において周辺の交通環境を現実的にシミュレートすることも不可欠です。そこで、2つのシステムを協調させてシミュレートすることができれば、お客様の求める効率性について、再現可能で包括的な評価が容易になります。これは柔軟にパラメータを設定できるトラフィックシナリオを用いるもので、最初のプロトタイプができる前の開発プロセスの早期においても実行できます。
車両と交通環境の協調シミュレーションをエキスパートレベルで実行
車両と交通環境のシミュレーションには、それぞれ2つの専門的なソリューションが存在します。
1つ目はトラフィックフローシミュレーションツールのPTV Vissimです。これは新しい道路設備のトラフィックフローを評価するツールとして世界的に認知されています。当ツールは柔軟なビヘイビアモデルを使用しており、車両の走行特性と縦横無尽に動くすべての道路利用者の相互作用を個別にマッピングして、交通環境全体を現実に即して生成します。交通参加者を取り込むことにより、さまざまな運転スタイルやルール違反も含め、特定の場所で見られる車両のリアルな走行動作をシミュレーションで正確に再現できるようになります。
2つ目はシミュレーションツールスイートであるASM(Automotive Simulation Models)です。これを使用すると、未来の車両を現実的にモデリングし、その効率性を分析し最適化することができます。これには車体やパワートレインのトポロジも含まれており、たとえば、内燃エンジンやモーターだけでなく、バッテリ式電気自動車や燃料電池車の詳細なモデルを用いてさまざまなハイブリッドコンセプトをシミュレートすることが可能です。また、車両のコンセプトと車体デザインは柔軟に構成したり、詳細にパラメータ化したりできます。さらに、各種のインターフェースを使用すれば、開発した制御アルゴリズムをバーチャルECU(V-ECU)の形で統合し、SIL(Software-in-the-Loop)シミュレーションを行って開発の初期段階で最適化と分析を行うことも可能です。その後の開発プロセスでは、シミュレートした各種の車両コンポーネントを実際の部品に置き換えたうえでパワーHIL上で物理変数をエミュレートすることにより、モーターやバッテリの妥当性を確認することになります。
協調シミュレーションの付加価値
PTV VissimおよびASMによる協調シミュレーションでは、車両や交通環境に関連する領域に高度な現実性を与えることができるため、開発プロセスのできる限り早期の段階で現実的な検証を行えます。ここでは、PTV Vissimで生成されたトラフィックがASM内で自車の詳細な周辺交通として使用され、すべての車両が相互に連携して動作します。とりわけこの2つの世界の組み合わせなら、現実的な条件をデモンストレートすることが可能になります。たとえばRDE(Real Driving Emissions)ドライブ等、現実に即した計測方法で再現性よくシミュレーションを実行することなどです。この協調シミュレーションは、SILやHIL、さらには制御ループに実車を使用するシミュレーション(VIL)など、さまざまな開発段階で使用できます。また、さまざまなシミュレーションをクラウド上で同時に実行すれば、新しい機能の妥当性確認が最大限効率的に行えるうえ、パラメータ空間の最適化も照準を絞って実行可能です。さらに、dSPACEのウェブベースのシミュレーションソリューションであるSIMPHERAを用いると、パラメータを定義された範囲で変更したり、最適な条件を検出するための最適化アルゴリズムを統合したり、さらには最小限の反復作業でコーナーケースを特定したりすることができます。パラメータの設定とオーケストレーションはウェブインターフェース経由で行われるため、さまざまな分野のエキスパートが地域的に離れた場所からそれぞれ手軽にアクセスし、共同作業をすることが可能です。また、継続的インテグレーション(CI)を活用すれば、このソリューションを用いて開発・最適化したECUコードが自動的にコンパイルされ、協調シミュレーションでテストができるうえ、さらに分析のためのレポートも用意されます。
概念実証の評価
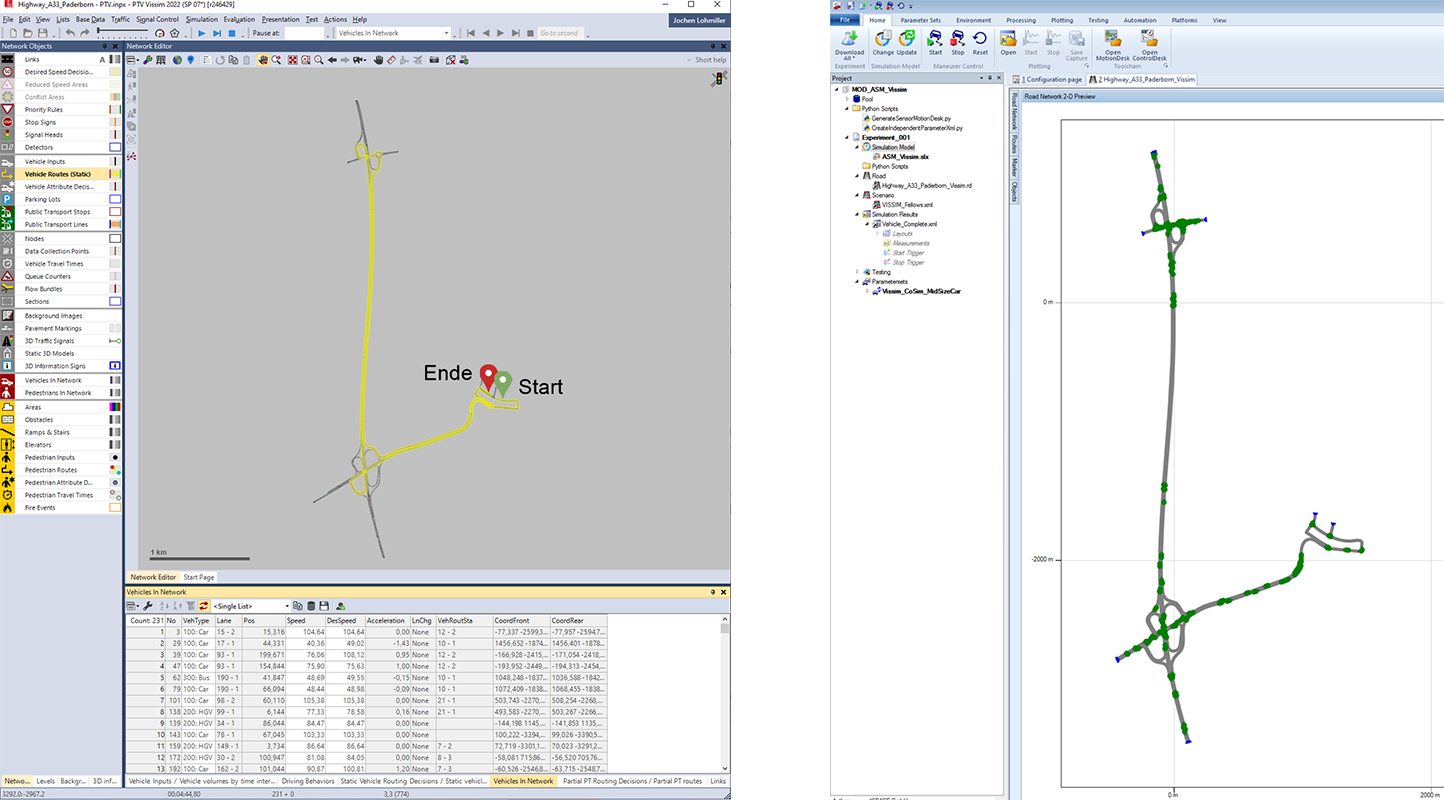
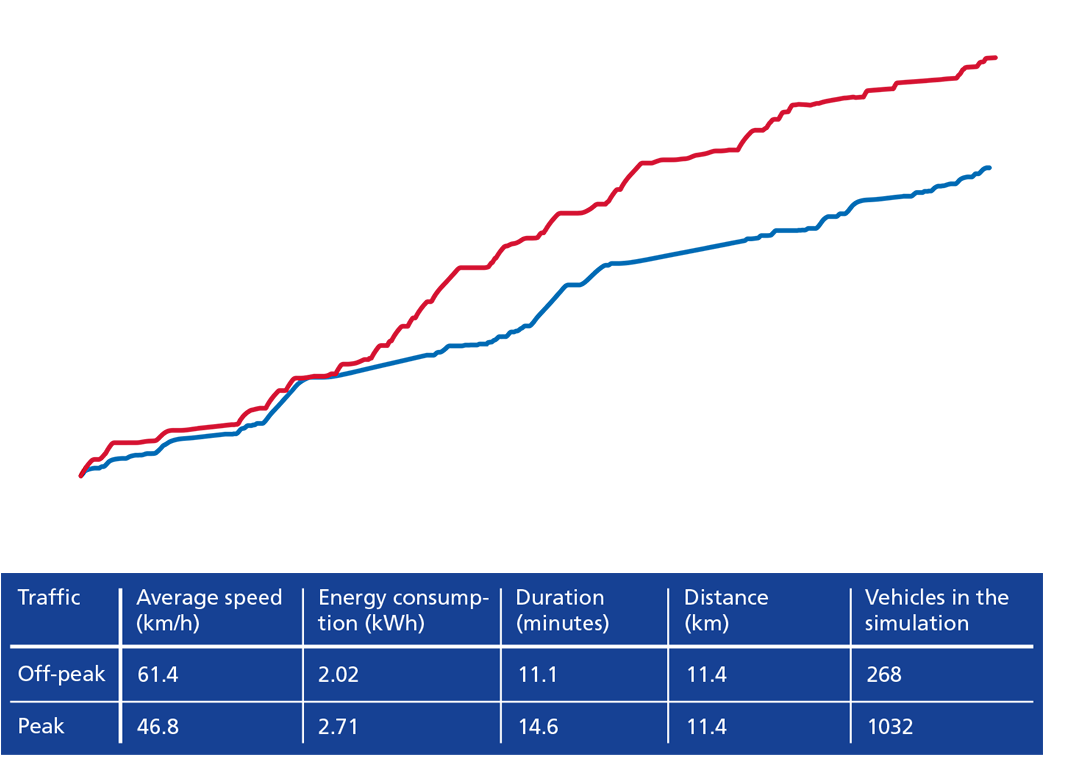
この協調シミュレーションの概念実証に必要なステップはSIMPHERAで行われました。車軸ごとに1台の永久磁石同期モーターを備える中型のバッテリ式電気自動車が、複雑な周辺交通において、どのようにエネルギーを消費するかを協調シミュレーションで分析したケースは、その典型的な例です(図1)。この際、交通環境としては、パーダーボルン近くのA33高速道路の一区画が、田舎道と都心部を取り込む延長を追加しつつ使用されました(図2)。準備段階では、道路網をOpen Street MapからModelDeskにインポートしたうえで、OpenDRIVE形式でPTV Vissimにエクスポートし、設定を自車と周辺交通という2つの領域に論理的に分割しました。自車に関しては、必要な運転操作をModelDeskで定義し、考えられるECUパラメータと起動信号を指定し、周辺交通に関しては、ドイツ連邦道路交通研究所(BASt)のカウントデータに基づく交通量、車両タイプ、車両のビヘイビアモデルとともに、信号機の信号プログラムや交通経路をPTV Vissimで定義しました。そして次のステップとして、交通量の異なる複数のインスタンスを用いてSIMPHERAでテストを同時にシミュレートしたところ、高速なSILシミュレーションを用いたことが、結果の迅速な入手につながりました(図3)。そしてそれらの結果から、交通量が移動時間、平均速度、およびエネルギー消費に与える影響が明らかになったのです。
dSPACE ASMおよびPTV Vissimでの協調シミュレーションが、車両と交通環境の非常に精密なモデリングを可能にしたため、私たちはエネルギー効率について盤石な研究を行うことができています。また、Linuxをクラウド上に実装したことで、システムの拡張性が向上し、必要に応じて多数のバリエーションを同時に評価できるようになりました。

今後の展望:ドライブコンセプトと運転機能の分析
エネルギー消費の分析例を用いて車両および交通環境の詳細な協調シミュレーションを行う上記の手法は、都市で運行される自動運転シャトルバスの開発など、その他の分野でも有効活用することが可能です。 PTV Vissim では、歩行者が大勢いるときでさえ、複合的な周辺交通を現実に即してシミュレートすることができ、シャトルバスの自動運転機能をV-ECUの形でASMと連携させてテストすることも可能です。AURELIONの現実的なセンサシミュレーションとSIMPHERAのインテリジェントなテスト制御を組み合わせれば、周囲を取り巻く交通や歩行者との相互作用のなかで、さまざまなコーナーケースを効率的に特定して同時に分析することができます。このような協調シミュレーションを利用することで、ドライブコンセプトや運転機能を現実的な条件下で効率的にシミュレートし、妥当性確認を開発の早期段階で行えるようになります。
dSPACE MAGAZINE、2020年11月発行
著者について:

Matthias Pfriem工学博士
自動車開発分野の顧客担当シニアアカウントエグゼクティブ、PTV Planung Transport Verkehr社、カールスルーエ、ドイツ

Jochen Lohmiller教授
PTV社(カールスルーエ)の元トラフィックシミュレーション担当プロダクトマネージャ。ベルリン応用科学大学(BHT)交通工学部の現教授。
Dennis Roeser氏
dSPACE(パーダーボルン)のシミュレーションモデリング担当シニアアプリケーションエンジニア