Increased efficiency and decarbonization are key drivers of modern vehicle development. To evaluate the actual effectiveness of measures at an early stage with ever shorter development cycles, co-simulations from dSPACE ASM for detailed vehicle models and PTV Vissim for realistic traffic provide surprisingly detailed insights.
Mobility is a basic human need and is often a prerequisite for social participation. In Germany, the transport sector is responsible for more than a quarter of the final energy consumption and the corresponding emissions and must therefore make an important contribution to tackling anthropogenic climate change. The quest for greater efficiency and sustainability is a key driver of modern vehicle development. Ambitious fleet emission targets set the framework. For example, nowadays almost every second new passenger car in Germany is already a hybrid or electric vehicle, and by 2030 at the latest, new registrations in key markets such as Europe are likely to be dominated by battery-electric vehicles.

Identify and Leverage Efficiency Potential
There are many different approaches to increasing the efficiency of a vehicle, starting with the choice of vehicle concept and body style, for example, SUV or sedan, through the design of the drive system and components, to the optimization of the operating strategy. In battery-electric vehicles, higher efficiency leads directly to an increase in range per charge without requiring higher battery capacity. Standardized test cycles such as the WLTP (Worldwide Harmonized Light Vehicle Test Procedure) are suitable only to a limited extent for generating valid statements about savings potential which is actually market-relevant and customer-relevant. A reliable evaluation of the potential requires testing under different traffic situations, route types, and environmental parameters. As a real-life test, however, this can be implemented only at great expense and only once the project has reached a sufficient degree of maturity.
Comprehensive Evaluation of Measures in Realistic Simulations
Investigation in simulation is an efficient alternative to real testing. For a valid evaluation of efficiency and possible optimization measures, it is necessary to model both the vehicle and the traffic and driving environment in great detail and realistically, which requires highly specialized software environments with specific domain knowledge. On the one hand, a detailed simulation of the entire vehicle with all relevant components and operating strategies is required in order to be able to determine the effects of even small variations; on the other hand, exact mapping of the traffic network and a realistic simulation of the surrounding traffic on different types of routes as well as in different situations is necessary. Co-simulation of both systems now facilitates reproducible comprehensive evaluation of customer-relevant efficiency in flexibly parameterizable traffic scenarios, early in the development process before the first prototypes are built.
Co-Simulation of Traffic and Vehicle at Expert Level
Here, two expert solutions for traffic and vehicle simulation come into play:
PTV Vissim is a traffic flow simulation tool which is recognized worldwide for evaluating the traffic flow of new road facilities. It uses flexible behavior models that map driving characteristics and interactions of all road users individually in longitudinal and lateral motion, which then results in realistic overall traffic. Locally observed, real driving behavior can be accurately reproduced in the simulation by calibrating the participants. This includes different driving styles and rule violations.
In order to analyze and optimize the efficiency of future vehicles, the Simulation Tool Suite ASM (Automotive Simulation Models) models them realistically. This includes vehicle bodies and powertrain topologies. For example, various hybrid concepts can be simulated with detailed models of the combustion engine and electric motors, as well as battery-electric and fuel-cell electric vehicles. Vehicle concepts and body designs can be flexibly configured and parameterized in detail. Interfaces enable the integration of control algorithms developed in the form of virtual ECUs (V-ECUs) to perform initial optimizations and analysis in software-in-the-loop (SIL) simulations. In the further development process, various simulated vehicle components can be replaced by real parts, for example, to validate electric machines and accumulators by emulating physical variables on the power HIL.
Added Value of Co-Simulation
In order to be able to perform realistic simulations as early as possible in the development process, the co-simulation of PTV Vissim and ASM offers a high degree of realism in the relevant domains of traffic and vehicle. Here, the traffic generated by PTV Vissim in ASM is used as surrounding traffic for the detailed ego-vehicle so that all vehicles interact with each other. In particular, the combination of both worlds makes it possible to demonstrate realistic conditions, for example, in order to reproducibly simulate realistic measurement approaches such as real driving emission (RDE) drives. This co-simulation can be used in the various development phases, from SIL and HIL to simulation with a real vehicle in the control loop (VIL). In order to make the validation of new functions as efficient as possible and to optimize the parameter space in a targeted manner, the simulation can also be performed in parallel in the cloud. SIMPHERA, the web-based simulation solution from dSPACE, offers the possibility to vary parameters in defined ranges and to integrate algorithms for optimization that find optima or identify corner cases with as few iterations as possible. Parameterization and orchestration are performed via the web interface so that experts from different domains can conveniently collaborate from different locations. Using continuous integration (CI), it is possible to automatically compile the ECU code developed and optimized with this solution and to test it in the co-simulation. Reports are then available for analysis.
Evaluation of the Proof of Concept
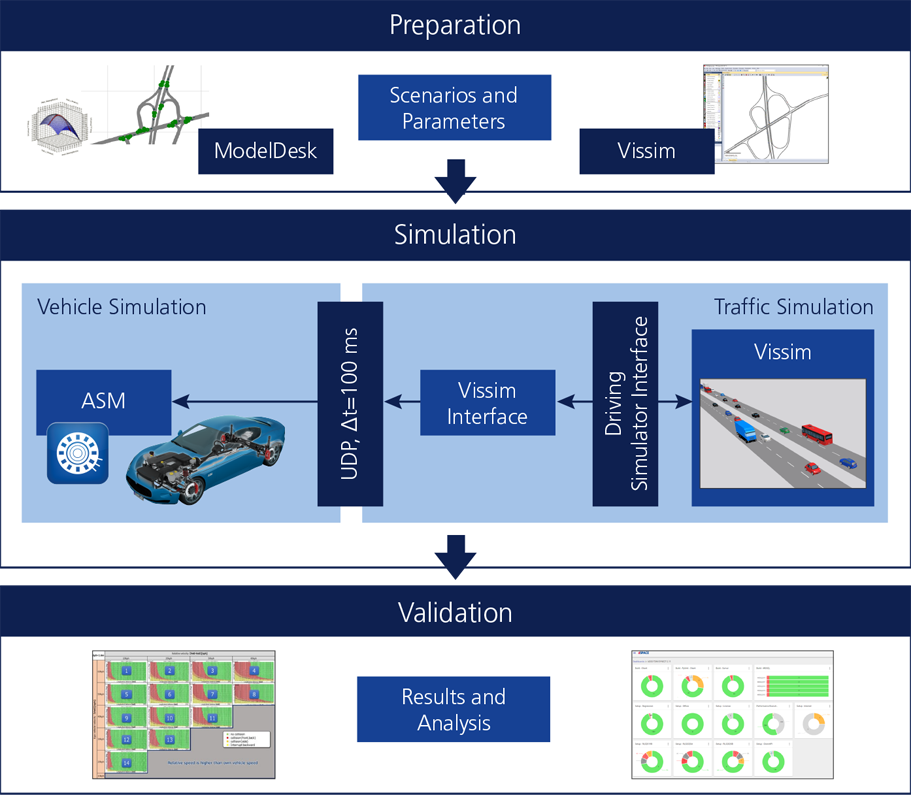
The steps required for the proof of concept were performed in SIMPHERA. They exemplify the co-simulation and analysis of the energy consumption of a battery electric mid-size vehicle with one permanently excited synchronous machine per axle in complex surrounding traffic (figure 1). The traffic environment is a section of the A33 highway near Paderborn with an extension to include a country road and an inner-city area (figure 2). In the preparation step, the road network is imported into ModelDesk from Open Street Map and then exported in OpenDRIVE format to PTV Vissim. The setup is logically divided into two areas: the ego-vehicle and surrounding traffic. For the ego-vehicle, the desired driving maneuvers are defined in ModelDesk and possible ECU parameters and activation signals are specified. For the surrounding traffic, PTV Vissim defines the traffic volumes based on count data from the German Federal Highway Research Agency (BASt), the vehicle types, and the behavior models of the vehicles, as well as traffic light signal programs and traffic routing. In the next step, the test is simulated in SIMPHERA, in parallel in several instances with different traffic volumes. Due to the fast SIL simulation, the results are available within a short time (figure 3). From them, the influence of traffic volume on travel time, average speeds, and energy consumption can be seen.
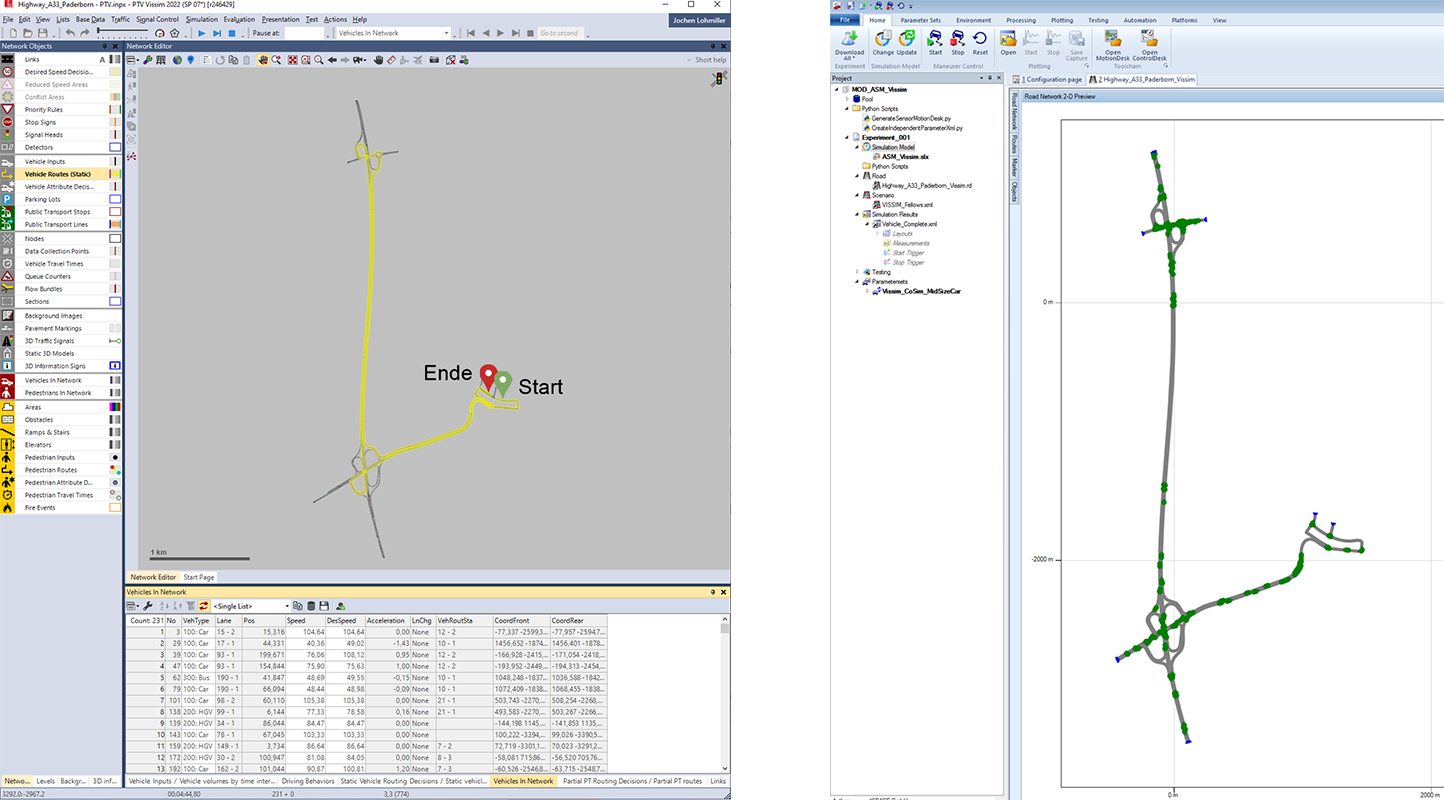
Figure 2: Overview of the test route in PTV Vissim (left) and in ModelDesk (right). The route data was exchanged between the tools in OpenDRIVE format.
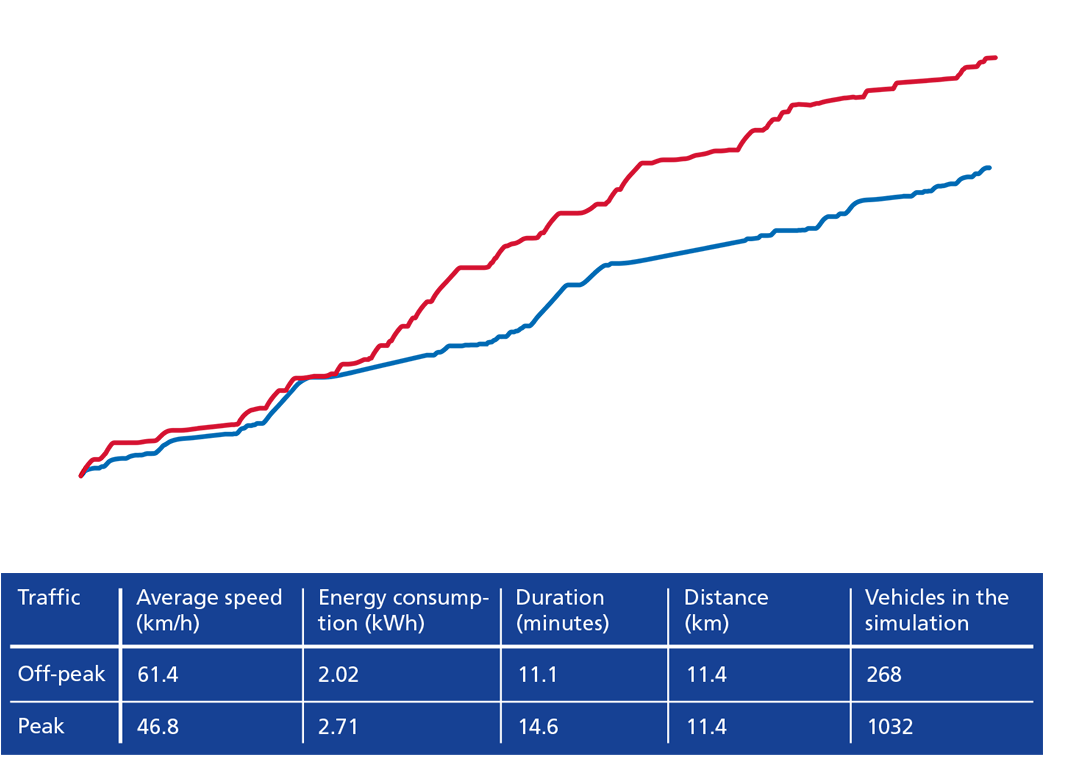
Figure 3: Energy consumption of the ego-vehicle in the peak (red) and off-peak (blue) traffic scenarios.
Table: Selected characteristic values of the off-peak/peak traffic scenarios.
The co-simulation of dSPACE ASM and PTV Vissim enables us to model the vehicle and traffic in great detail and thus perform reliable energy efficiency studies. And thanks to Linux implementation in the cloud, the system scales highly parallel to evaluate umpteen variations simultaneously, if needed.

Outlook: Analysis of Drive Concepts and Driving Functions
The co-simulation of detailed vehicle simulation and detailed traffic simulation demonstrated here using the example of energy consumption analysis can also be used in other areas to add value, for example in the development of autonomous shuttle buses for urban operation. PTV Vissim can be used to realistically simulate multimodal surrounding traffic, even with large numbers of pedestrians. Functions for automated driving for shuttles can be coupled to ASM as V-ECU. Together with a realistic sensor simulation in AURELION and the intelligent test control in SIMPHERA, corner cases in the interaction with surrounding traffic and passers-by can be efficiently identified and analyzed in parallel. With such co-simulation, drive concepts and driving functions can be efficiently simulated under realistic conditions and validated at an early stage.
dSPACE MAGAZINE, PUBLISHED NOVEMBER 2022
About the authors:

Dr.-Ing. Matthias Pfriem
In his role as Senior Account Executive at PTV Planung Transport Verkehr GmbH in Karlsruhe, Germany, Dr.-Ing. Matthias Pfriem is responsible for customers from automotive development.

Prof. Dr. Jochen Lohmiller
Prof. Dr. Jochen Lohmiller was Product Manager for Traffic Simulation at PTV GmbH in Karlsruhe and is now professor of traffic engineering at Berlin University of Applied Sciences (BHT).

Dennis Roeser
Dennis Roeser is Senior Application Engineer for simulation modeling at dSPACE GmbH in Paderborn.