提高使用效率和脱碳是现代汽车开发的主要驱动力。由于开发周期日益缩短,为了在早期阶段评估各项措施的实际效用,可以将dSPACE ASM用于详细的车辆模型、将PTV Vissim用于真实交通,两者协同仿真,带来令人惊讶的发现。
出行是人类的基本需求,也往往是社会参与度的先决条件。在德国,交通运输行业占最终能源消耗和相应排放量的四分之一以上,该行业需要为应对人为气候变化做出重要贡献。追求高效率和可持续发展是现代汽车开发的主要驱动力。未来的车辆排放目标有了框架。比如,如今在德国,几乎每两辆新乘用车中就有一辆是混合动力汽车或电动汽车,最迟到2030年,纯电动汽车很可能在欧洲等关键市场的新注册汽车中占主导。

确定并充分利用效能
有多种方法可以提高汽车效率,其中包括车辆设计和车辆类型的选择(例如SUV或轿车)、驱动系统和部件的设计,乃至运行策略的优化。电池电动车效率提高的话,无需搭载更高的电池容量,即可直接增加电续航里程。WLTP(全球轻型车测试规范)等标准化测试周期仅在一定程度上适用于在特定工况下的相关的节能潜力的评估测试。要可靠地评估节能潜力,需要在不同的交通状况、路线类型和环境参数下进行测试。进行真实的测试需要巨大的费用,而且项目要足够成熟才能实现。
在真实仿真中全面评估各项措施
在仿真中进行测试可以有效替代真实测试。为有效评估效率和可能的优化措施,有必要对车辆、交通和驾驶环境进行非常详实地建模,这需要特定知识领域高度专业化的软件环境。一方面,需要详细仿真整个车辆的所有相关部件和控制策略,以便确定即便是很小的变化带来的影响;另一方面,需要精确映射交通网络,真实地仿真不同路线类型和不同情况下的周围交通状况。现在,在开发过程的早期,在第一个原型构建之前两个系统协同仿真,有助于在灵活参数化的交通场景中对与客户相关的效率进行可重复的综合评估。
专家级交通与车辆协同仿真
有两个交通和车辆仿真专业解决方案在其中发挥作用:
PTV Vissim是世界公认的交通流量仿真工具,用于评估新建道路设施的交通流量。它采用灵活的行为模型,分别在纵向和横向运动中映射所有道路使用者的驾驶特征和交互,形成真实的整体交通。通过局部观察,它会校准交通参与者,在仿真中准确再现真实的驾驶行为。这包括不同的驾驶风格和违反规则的行为。
为了分析和优化未来车辆的效率,仿真工具套件ASM(汽车仿真模型)对它们进行了真实建模。其中包括车身和动力传动系统拓扑结构。例如,该套件可以通过内燃发动机、电动机以及电池电动汽车和燃料电池电动汽车的详细模型,仿真各种混合动力概念。车辆概念和车身设计可以灵活配置和详细参数化。各个接口支持以虚拟ECU(V-ECU)形式开发控制算法的集成,以便在软件在环(SIL)仿真中执行初步优化和分析。在进一步的开发过程中,可以将各种仿真车辆部件替换为真实零部件,例如,通过模拟功率HIL上的物理变量来验证电机和蓄能器。
协同仿真的附加值
为了在开发过程中尽早进行逼真的仿真,PTV Vissim与ASM协同仿真,非常逼真地仿真交通和车辆的相关领域。PTV Vissim在ASM中生成的交通状况被用作具体自主车辆的周围交通,以便所有车辆交互。特别要指出的是,这两个世界相结合可以演示真实的条件,例如,重复仿真实际行驶排放(RDE)等真实的测量方法。这种协同仿真可以用于开发过程的各个阶段,包括SIL和HIL,以及在控制回路(VIL)中仿真实车。为了让新函数的验证尽可能高效并有针对性地优化参数空间,也可以在云中并行执行仿真。dSPACE推出了基于Web的仿真解决方案SIMPHERA,它可以在指定范围内改变参数以及集成优化算法,找到最佳状态或识别极端情况。参数化和编排通过Web界面执行,方便不同领域的专家在不同地方协作。采用持续集成(CI),可以自动编译使用该解决方案开发和优化的ECU代码,并在协同仿真中对其进行测试。随后,就可以分析报告了。
评估概念验证
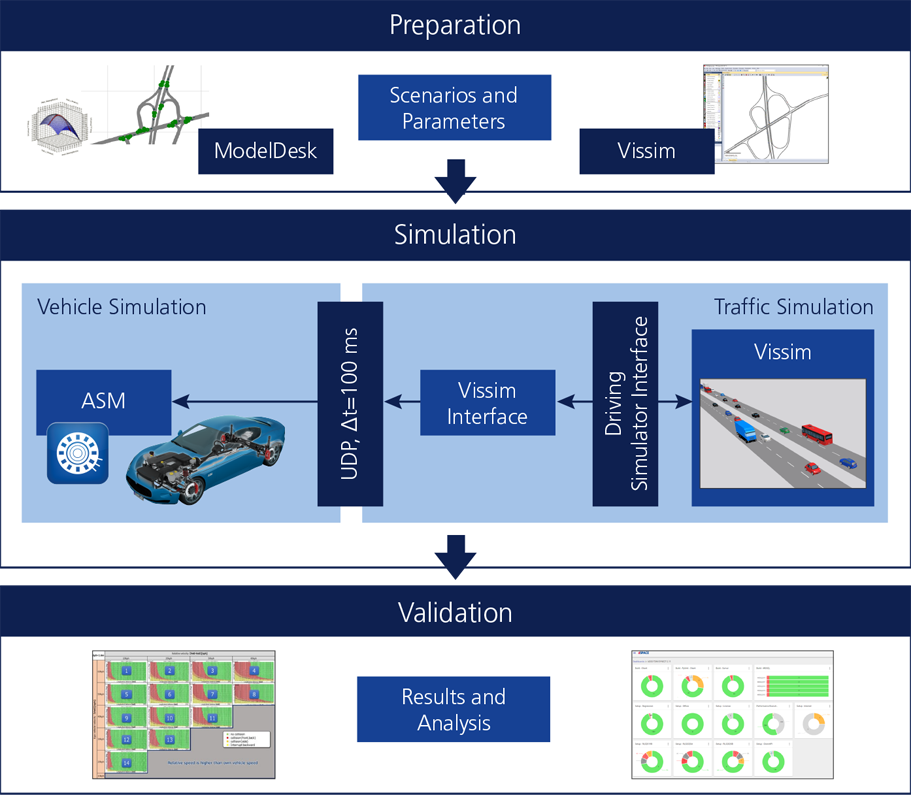
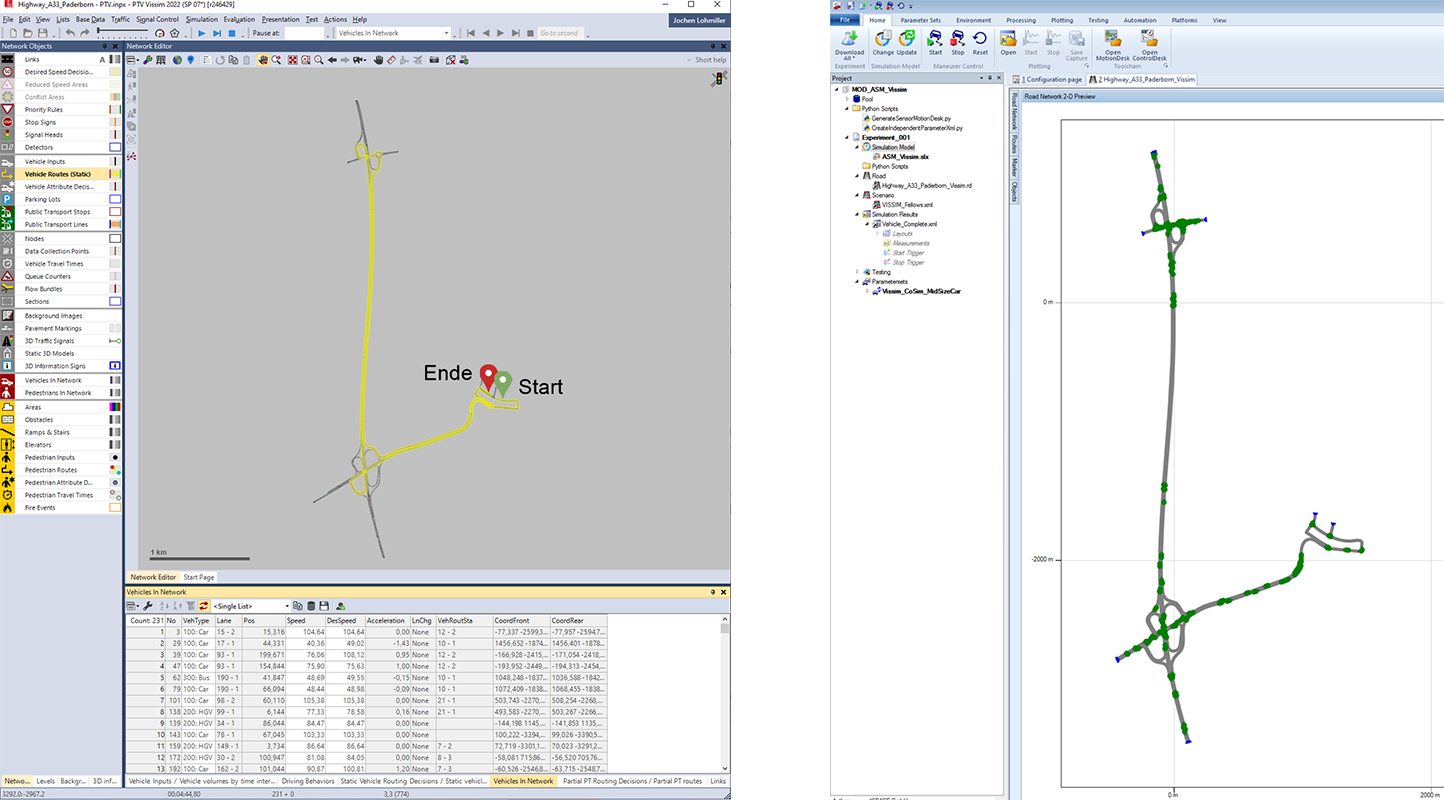
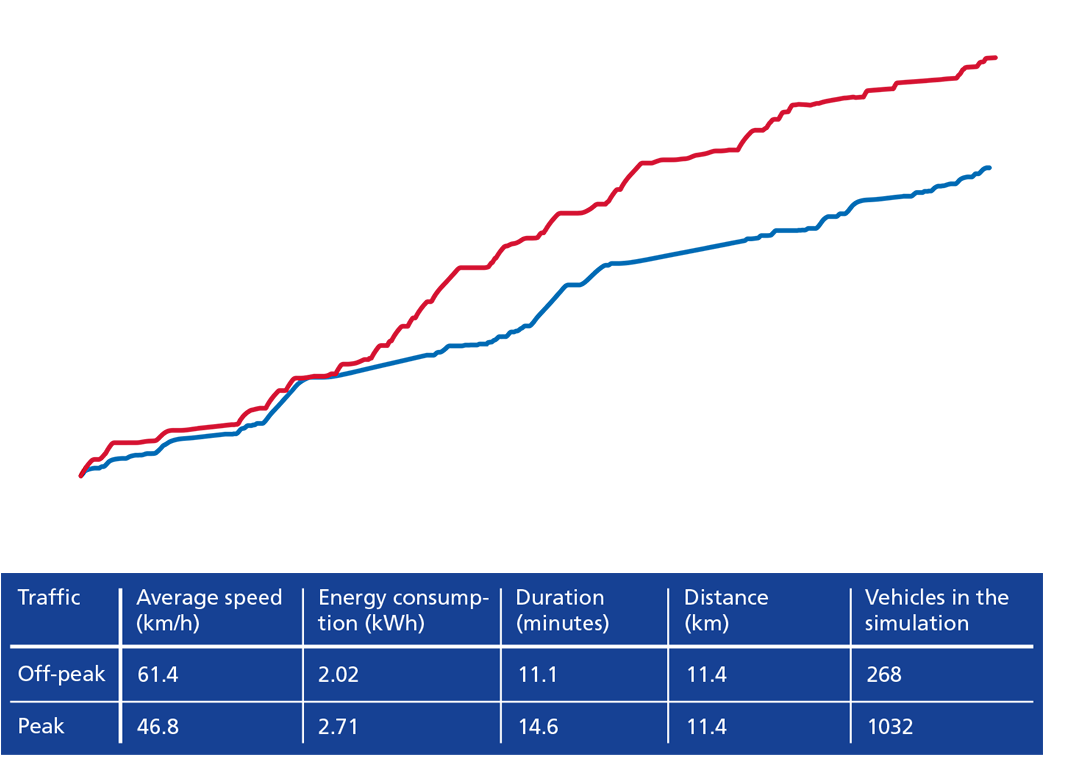
概念验证所需的步骤是在SIMPHERA中执行的。这些步骤举例说明了在复杂的周围交通环境中,每轴具有一个永久激励同步电机的电池电动中型车辆能耗的协同仿真和分析(图1)。交通环境是帕德伯恩附近的A33高速公路的一段,延伸部分包括一条乡村道路和一个内城区域(图2)。在准备步骤中,将道路网从Open Street Map导入ModelDesk,然后以OpenDRIVE格式导出到PTV Vissim。按照逻辑,该设置分为两个区域:自主车辆和周围交通。针对自主车辆,在ModelDesk中定义所需的驾驶操作,并指定可能的ECU参数和激活信号。对于周围交通,PTV Vissim会根据德国联邦公路研究机构(BASt)的统计数据、车辆类型、车辆行为模型,以及交通灯信号程序和交通路线来定义交通流量。接下来,在SIMPHERA中并行仿真几个具有不同交通流量的实例。由于SIL仿真速度快,很快就可以得出结果(图3)。从中可以看出交通流量对出行时间、平均速度和能耗的影响。

展望:驾驶概念和驾驶概念分析
图中利用能耗分析示例演示了详细车辆仿真和详细交通仿真的协同仿真。为增加价值,协同仿真也可以用于其他领域,例如开发城市运营自动驾驶穿梭巴士。 PTV Vissim 可以用来真实地仿真周围的多模式交通,即使有大量行人。穿梭巴士的自动驾驶功能可以作为V-ECU与ASM耦合。协同仿真结合AURELION中的真实传感器仿真和SIMPHERA中的智能测试控制,可以高效识别和并行分析与周围交通及路人交互中的极端情况。利用这种协同仿真,可以在真实的条件下有效仿真驾驶概念和驾驶功能,并在早期阶段予以验证。
《dSPACE杂志》,2022年11月出版
作者简介:

工程学博士Matthias Pfriem
工程学博士Matthias Pfriem任德国卡尔斯鲁厄PTV Planung Transport Verkehr GmbH高级客户专员,负责汽车开发领域的客户。

Jochen Lohmiller教授
Jochen Lohmiller教授曾任卡尔斯鲁厄PTV GmbH交通仿真产品经理,现任德国柏林应用科技大学东亚合作中心(BHT)交通工程教授。

Dennis Roeser
Dennis Roeser是dSPACE GmbH帕德博恩公司的高级应用工程师。