道路交通における危機的状況は、多様かつ複雑であることが見込まれます。不測の事態に最大限備えられる最新世代の車両のためには、可能な限り現実に近く、それゆえに妥当性確認に緻密な精度を与えてくれる、きめ細やかに調整されたテストシナリオが必要です。
リアリスティックセンサシミュレーションが不可欠
先進運転支援システム(ADAS)や自動運転(AD)分野における各種の革新的なアプリケーションでは、個々の車載センサからの信号を処理し、特定の状況では運転プロセスに積極的に介入を行います。このような機能が複雑さを増すにつれ、その制御技術に対する要求も増し、それは例えば高度なセンサテクノロジでなければ満たせないほどのレベルになります。
つまり現在のADASおよびAD分野の進展は、センサリアリスティックシミュレーション無しには成立しないということです。センサリアリスティックシミュレーションは、天候や明るさなどのさまざまな条件下での車載センサや車両環境の反応を精密にシミュレートすることができるため、テスト担当者へ環境やトラフィックシナリオが正しく取得・評価されたかどうかを明確に示すことができます。この手法なら、正確に再現可能な形で使用され得るさまざまな関連テストシナリオを用いて、ECUを現実的な条件下でテスト・検証することが可能です。
AURELIONがSILテストとHILテストをつなぐ
dSPACEは、一度に複数のメリットをユーザーに提供できるツールとしてAURELIONを開発しました。
- SIL(Software-in-the-Loop)テストはあらゆる速度で実行することが可能ですが、HIL(Hardware-in-the-Loop)テストは正確なリアルタイム条件下で実行します。AURELIONは2つの使用法のどちらにも等しく対応しているため、たとえば開発の前段階をSIL環境でスタートしても、そのシミュレーションモデルは、そこで生まれたすべてのシミュレーション成果物を含め、HILテストでシームレスに利用することが可能です。
- 大規模に集積されたプロセッサやクラウドを使用して演算能力を拡張することで、テストを並行して実行することが可能になり、それゆえにパラメータ変更によって生じる膨大な数のテストとそのバリアント対応も現実的な時間内に行うことができます。自動運転機能の開発では、安全関連のシナリオで定義される、膨大な走行距離の検証を行う必要があるため、現実的な時間内に検証を行うことは非常に大切です。
- 一方で、現実に即した合成センサデータは、シミュレーションによる開発や検証の土台となるものです。LiDAR、レーダー、カメラなど、センサはどれであろうと、仮想センサのシミュレーションが本物のセンサをより正確にシミュレートできればできるほど、結果の妥当性は高くなります。そのため、dSPACEでは世界中の名だたるセンサメーカーと長期的な関係を維持して、IP保護を尊重しながら彼らの作るセンサモデルをシミュレーションのなかで再現できるようにしています。
-
このような緊密な連携により、dSPACEはセンサレベルでの有用なセンサデータを入力するノウハウを培っており、お客様は非常に精度の高いエリアのセンサを含めたテストを実行することができます。
AURELIONのセンサリアリスティックシミュレーションのおかげで、私たちはBSISを開発する際に、建設現場の状況や周辺の建物による多重反射などの外部からの通常の影響だけでなく、多種多様に変動する都市交通の影響を考慮することができました


テストケースのシミュレーションが人命を救う
AURELIONを用いたレーダーセンサの開発方法について、具体的な例を示します。
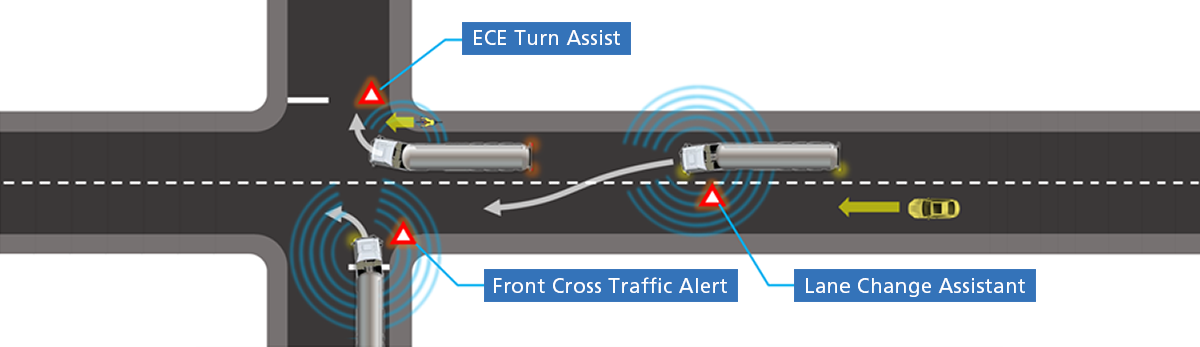
HELLA社では、dSPACEをパートナーとして協働し、UNECE 151の「自転車検出用死角情報システムの規則」に基づき、さまざまな使用事例の妥当性を確認できるシミュレーションソリューションを構築しました。HELLA社のシステムおよびソフトウェアレーダーセンサシミュレーション部門の責任者であるMichael Lemm氏は、「この規則は特に、ドライバーから最も遠い側にいる、脆弱な道路使用者をより安全に守ることを目的としています。これを達成するため、トラックは死角にある障害物を検出してドライバーに警告するシステムであるBSIS(Blind Spot Information System)を搭載しなければなりません」と説明します。これへの対応策としては、さまざまな統合シナリオが考えられます。たとえば、2つのセンサを異なる高さに設置して、可視性が低い場所や視界が悪くてまったく見えない領域を照らし出すなどです。
システムの要件は、静的なテストケースと動的なテストケースと併せて、上述の規則に定義されています。静的なテストケースの一例として、信号で停車中のトラックの右側から、自転車が停止線に近づく状態があります。この場合、同規則では、自転車がトラックの前に達する1.4秒以上前に、ドライバーに警告することが必要であると定めています。
開発段階で既にすべてのシナリオを仮想的にカバー
Lemm氏は、「レーダーセンサベースでBSISを開発するにあたり、AURELIONというレーダーシミュレーションソリューションを使用したことは有益でした。これのおかげで前述のテストケースを開発プロセスの非常に早期の段階で実装することができました」と述べています。ここでは、さまざまな設計や開発作業を同時並行的に実行できるだけでなく、実際のセンサを使用する必要もありません。汎用的なレーダーシミュレーションモデルを用いると、センサをトラックのどこに設置するかによって、センサの検出能力にどのような影響を与えるかについてテストすることができます。さらにこの手法なら、特定のプロトタイプを入手できない場合でも、専用のレーダーシミュレーションモデルを使用してBSISセンサのアルゴリズムを開発することが可能です。
Lemm氏は、「そのうえ、完全なビークルダイナミクスシミュレーション(ASM)を組み合わせれば、トラックのさまざまな積載物の影響も事前に検討できます。これにより、車両へ実際のセンサを搭載する前に、搭載位置によりセンサがどの範囲に対応できるかを検討することが可能になり、非常に有益です。シミュレーションソリューションとしてのAURELIONの利点は、同一のシミュレーションモデルやシナリオをさらに他のテストで再利用でき、それらを認証からリリーステストに至るまで多くの使用事例に活用できることです」と述べています。
シミュレーションには、カーブや直線道路、トレーラ、天候状況さえもあらかじめ考慮に入れておけるので、その後、実際に機能を実装する段階が準備万端で迎えられます。センサの取り付け位置を決定した後で大掛かりな後処理が発生することを避けられるのです。
ミリ秒単位の精緻なシミュレーション
UNECE 151では、死角アシストシステムは最初の情報ポイント(FPI)と最後の情報ポイント(LPI)の間にある潜在的に危険な状況をドライバーに通知する必要があると定めています。FPIは潜在的に危険な状況を検出できる最も早期の段階の空間点と定義されており、LPIはシステムがドライバーに通知する必要がある最も遅い段階の空間点と定義されています。AURELIONなら、これらをミリ秒単位で正確にシミュレートできます。このシミュレーションが、開発の早期においてサプライヤとOEMメーカーが互いにスムーズな調和の中でシステムを構築することを可能にします。
Lemm氏は、「AURELIONのセンサリアリスティックシミュレーションのおかげで、私たちはBSISを開発する際に、建設現場の状況や周辺の建物による多重反射などの外部からの通常の影響だけでなく、多種多様に変動する都市交通の影響を考慮することができました」と説明します。
ビークルダイナミクスモデルなら、トラクタやトレーラのカーブ道路における挙動もさまざまなシナリオを用いて、リアルにビジュアル表示することが可能です。また、AURELIONでは認証に必要なダミー人形を用いたテストもシミュレートできます。
将来的に安全性が向上
UNECE 151の「自転車検出用死角情報システムの規則」のおかげで、自転車愛好者たちにとって道路が将来的にさらに安全な場所になり、命に関わる事故が過去のものとなることが期待されています。この例は、いかに技術的なイノベーションや高精度なテストシナリオが、OEMメーカーがさらなる技術開発を行うのを助け、こうした要望に応えるのを促しているかを明らかに示すものです。
HELLA社のご厚意により寄稿
dSPACE MAGAZINE、2023年6月発行

