Real-Time Interface (RTI)
Logiciel d'implémentation permettant le fonctionnement des modèles sur matériel dSPACE
La RTI vous permet de vous concentrer totalement sur le processus de conception réel et d'effectuer des itérations de conception rapides. Elle étend le générateur de code C Simulink Coder™ (anciennement Real-Time Workshop ® ), pour une implémentation automatique et fluide de vos modèles Simulink et Stateflow sur le matériel temps réel.
- Implémentation de modèles MATLAB ® /Simulink ® /Stateflow ® sur du matériel dSPACE
- Génération automatique de code
- Configuration graphique d'E/S via des bibliothèques de blocs Simulink complètes

Domaines d’application
Qu'il s'agisse d'un prototypage rapide de lois de commande ou d'une simulation Hardware-In-the-Loop : la Real-Time Interface (RTI) assure la liaison entre le matériel dSPACE et le logiciel de développement MATLAB/Simulink/Stateflow de MathWorks ® .
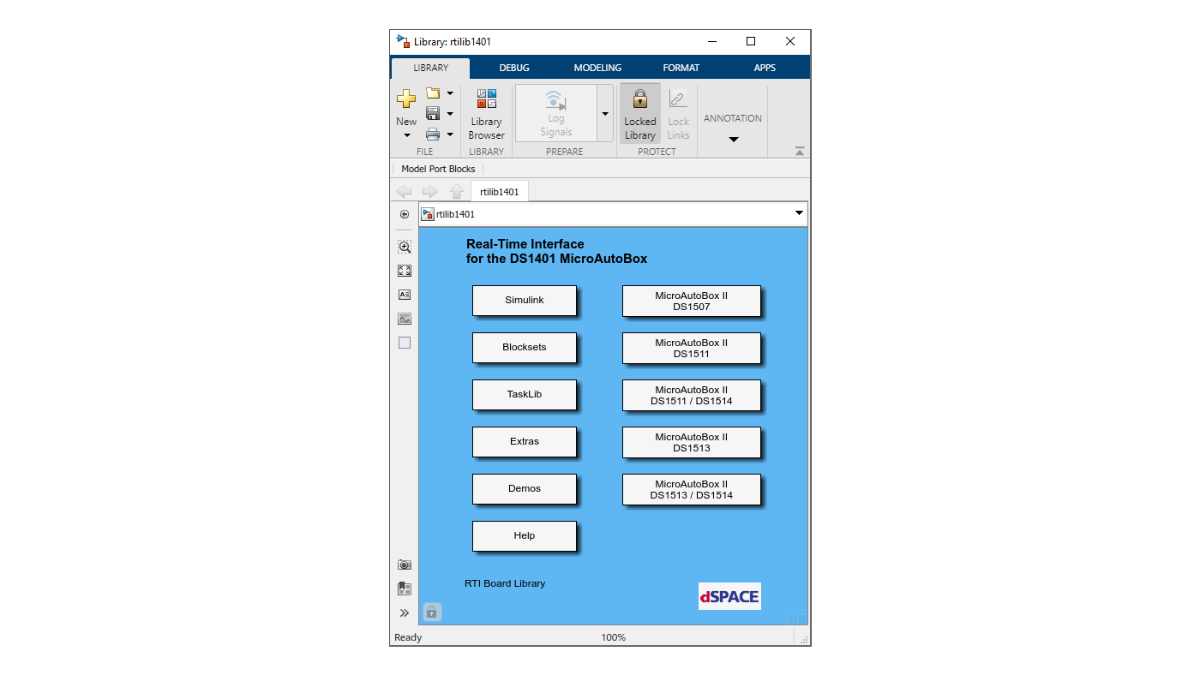
Travailler avec la RTI
Pour connecter votre modèle à une carte d’E/S dSPACE, il vous suffit de glisser-déplacer l’unité E/S de la bibliothèque de blocs RTI et de la connecter ensuite aux blocs Simulink. Tous les réglages, tels que le paramétrage, sont accessibles en cliquant sur les blocs appropriés. Le Simulink Coder™ (anciennement Real-Time Workshop ® ) génère le code du modèle pendant que la RTI fournit les blocs qui implémentent les fonctionnalités d'E/S des systèmes dSPACE dans vos modèles Simulink, préparant ainsi le modèle à l'application temps réel. Votre modèle temps réel est compilé, téléchargé et démarré automatiquement sur votre matériel temps réel sans que vous ayez à écrire une seule ligne de code. Le logiciel RTI vous assiste pendant la configuration. Le logiciel RTI fournit des vérifications de cohérence, permettant d'identifier et de corriger des erreurs potentielles avant ou pendant le processus de conception.
Des fonctionnalités complètes
La RTI commande toutes sortes de systèmes à temps continu, à temps discret et multi-échantillonnés. D’après le matériel E/S connecté, il est possible d’utiliser les différents canaux d’une même carte E/S avec des fréquences d’échantillonnage différentes et même dans des sous-systèmes différents. La RTI supporte les évènements asynchrones et vous permet de fixer des priorités de tâches et des stratégies de surcharge de tâches afin d’exécuter les sous-systèmes démarrés en cas d'interruption. Il supporte également les tâches déclenchées sur séquences temporelles et les indicateurs temporels qui vous permettent d’implémenter des tâches et des groupes de tâches avec des délais variables ou prédéfinis, en relation avec un événement déclencheur associé. La manipulation des tâches au sein de votre modèle devient ainsi très flexible. De plus, la RTI propose des vérifications qui vous aident à éviter une utilisation double ou inadaptée des canaux.
Avantages clés
La RTI vous permet de vous concentrer totalement sur le processus de conception réel et d'itérer rapidement. Elle étend le générateur de code C Simulink Coder™ (anciennement Real-Time Workshop ® ), pour une implémentation automatique et fluide de vos modèles Simulink et Stateflow sur le matériel temps réel. Le temps d'implémentation est dès lors considérablement réduit. Le logiciel RTI vous guide dans la configuration du matériel et fournit des vérifications de cohérence automatiques pour éviter les erreurs de paramétrage. Afin de vous offrir une flexibilité maximale, chaque version de RTI supporte plusieurs releases MATLAB différentes (voir www.dspace.com/go/Compatibility). Les modèles provenant de releases MATLAB et RTI antérieures migrent automatiquement dès que des versions plus récentes de la RTI sont utilisées.
Conception du modèle
Dans cet exemple, la boucle fermée du système de positionnement d’un disque dur est représentée sur le synoptique. Le contrôleur et le modèle du système contrôlé sont conçus dans l’environnement de développement MATLAB/Simulink.
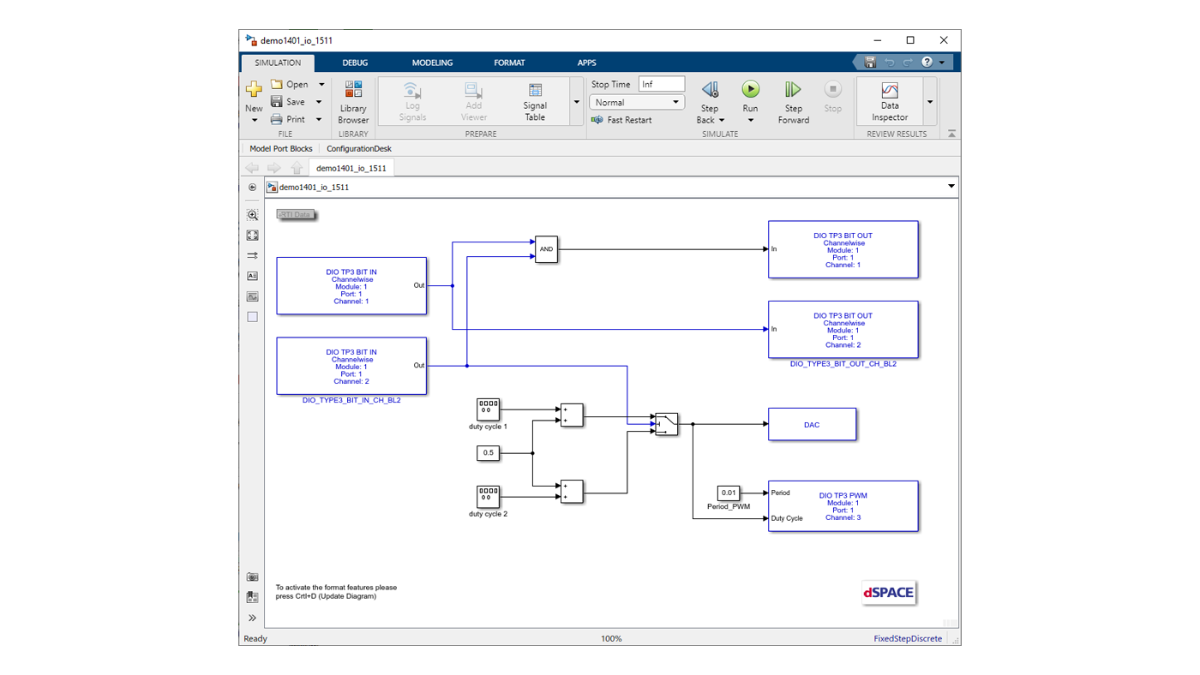
Configuration graphique des E/S
Lorsque vous avez fini de tester votre modèle dans Simulink, il doit être préparé pour l'implémentation sur le matériel temps réel. Le modèle d'environnement est remplacé par des blocs d'E/S qui constituent les interfaces avec le système contrôlé réel. Pour ajouter un modèle E/S, il suffit de faire glisser un bloc de la bibliothèque E/S de la RTI vers le modèle et de connecter le bloc avec l'E/S du contrôleur.
Spécification des paramètres
Les paramètres E/S sont spécifiés en double-cliquant sur un bloc E/S et en entrant les données dans des interfaces utilisateur graphiques. Dans cet exemple, les signaux d’entrée sont la valeur de retour et le signal de référence. Le signal de référence provient maintenant d'un générateur de signaux externe et est lu par un bloc ADC. Le signal de sortie du contrôleur est le signal de commande u_M, qui est émis par le matériel via un bloc DAC.
Implémentation sur le matériel dSPACE
L'implémentation automatique du modèle Simulink sur le matériel dSPACE est la clé pour des itérations de conception rapides. Avec RTI, vous ne verrez pas une seule ligne de code pendant ce processus. Un simple clic sur Build lance l'implémentation, y compris la génération de code, la compilation et le téléchargement. Vous pouvez sélectionner un algorithme d'intégration et une taille de pas dans la page Solver de la boîte de dialogue Configuration Parameters. Il est également possible d'automatiser la création de procédures à l'aide de scripts. Ceci est particulièrement utile pour les grands modèles.
Interaction avec Experiment Software
Lorsque votre application fonctionne sur le matériel temps réel, l'intégralité du logiciel d'expérimentation dSPACE est à votre disposition. RTI vous assure le contrôle de chaque variable individuelle immédiatement après le processus d'implémentation.
ControlDesk fournit un tableau de bord qui vous permet de modifier les paramètres et de surveiller les signaux – sans avoir à régénérer le code. ControlDesk affiche également les historiques temporels de toute variable utilisée par votre application.
Supporte le matériel dSPACE
Que vous utilisiez des systèmes dSPACE avec un DS1104 R&D Controller Board, une MicroAutoBox II ou une MicroLabBox : RTI permet de configurer facilement le modèle et les E/S de votre système dSPACE.
|
Blockset |
Description |
Further Information (See relevant product information) |
|
Real-Time Interface for Multiprocessor Systems |
|
|
|
RTI Bypass Blockset |
|
|
|
CAN Blocksets |
|
|
|
RTI LIN MultiMessage Blockset |
|
|
|
dSPACE FlexRay Configuration Package |
|
|
|
FPGA Programming Blockset |
|
|
|
Ethernet Blocksets |
|
|
|
RTI Electric Motor Control Blockset |
|
|
|
RTI DS1552 I/O Extension Blockset |
|
|
|
RTI RapidPro Control Unit Blockset |
|
|
|
RTI USB Flight Recorder Blockset |
|
– |
|
RTI Watchdog Blockset |
|
|
|
RTI Synchronized Time Base Manager Blockset |
|
– |
| Functionality | Description |
|---|---|
| I/O configuration |
|
| Generating real-time code |
|
| Automatic task definition |
|
| Invoking the compiler |
|
| Loading and starting the application |
|
- Ventes Notre équipe d’ingénieurs d’affaires vous assistera dans le choix de votre système dSPACE. Ils vous fourniront également les tarifs et toutes les informations souhaitées concernant d’autres produits dSPACE.
- Achat de logiciels dSPACE Informations sur le téléchargement, l’installation et le système de licence des logiciels dSPACE
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.